How laser scanners optimize your workflow:
Laser scanners are used for fast, non-contact and complete measurement of complex geometries. This new technology is increasingly replacing traditional surveying methods. The hardware of the various 3D laser scanners and the physical operating principle of the laser scanning systems on the market are decisive for the areas of application.
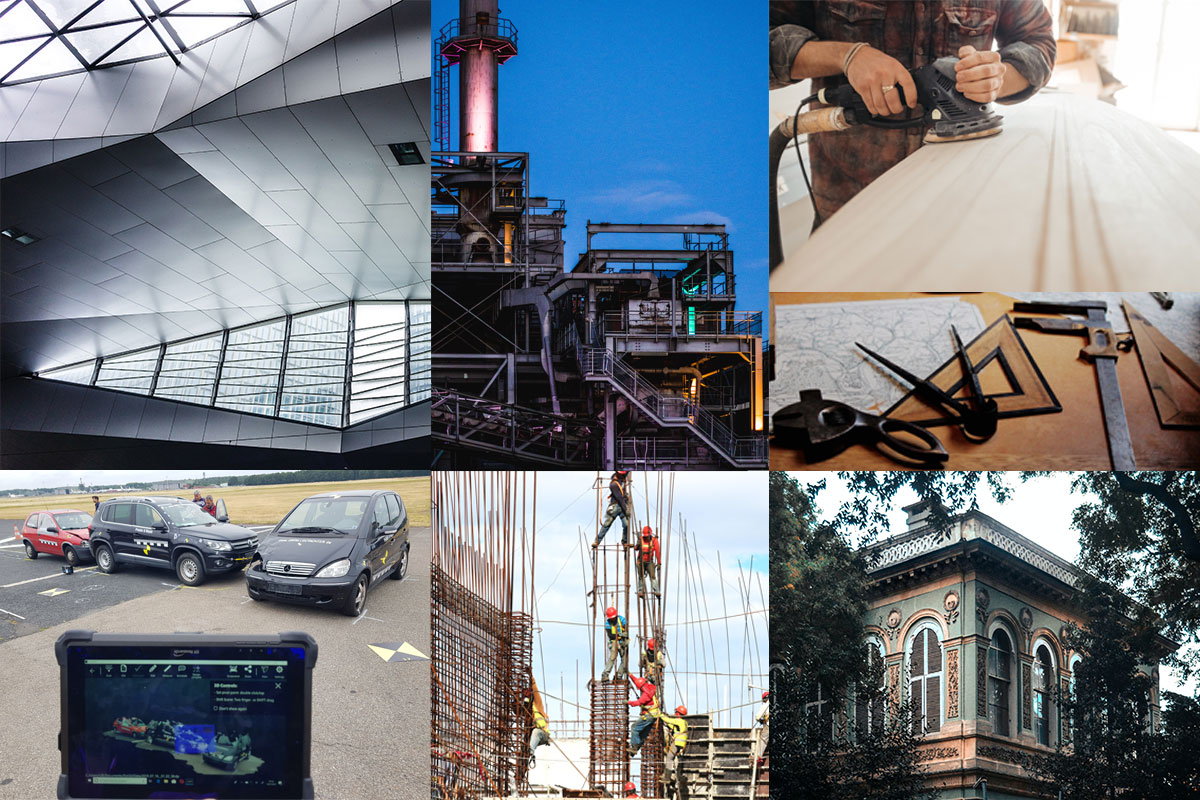
What are the areas of application?
More and more industries are discovering the benefits of laser scanning.
Typical areas of application are:
- Architecture & BIM
- Plant design
- Heritage
- Crafts
- Civil engineering
- Forensics
- Surveying
For example, 3D laser scanning is often used by architects and timber construction clients in combination with SEMA, Pytha, Vectorworks, Allplan, ArchiCAD and Revit. Engineering offices for plant design often work with Plant3D, MicroStation and SolidWorks. In surveying offices, as well as in civil engineering, data is often used with AutoCAD and GeoGraf. A constantly growing field is currently Public Safety and Forensics.
How the laser scanners work
Laser scanners are non-contact measuring systems that work on the basis of laser light. The laser scanner sensor emits a laser beam, which is reflected by the environment and picked up again by the receiving optics of the laser scanner. There are two measuring methods used in the devices: the time-of-flight (TOF) method and the phase based method. Laser scanners are therefore divided into the groups of TOF and phase based laser scanners. Systems with combined procedures are also represented on the market. Each method has special advantages that predestine it for certain applications.
Time-of-flight (TOF) method
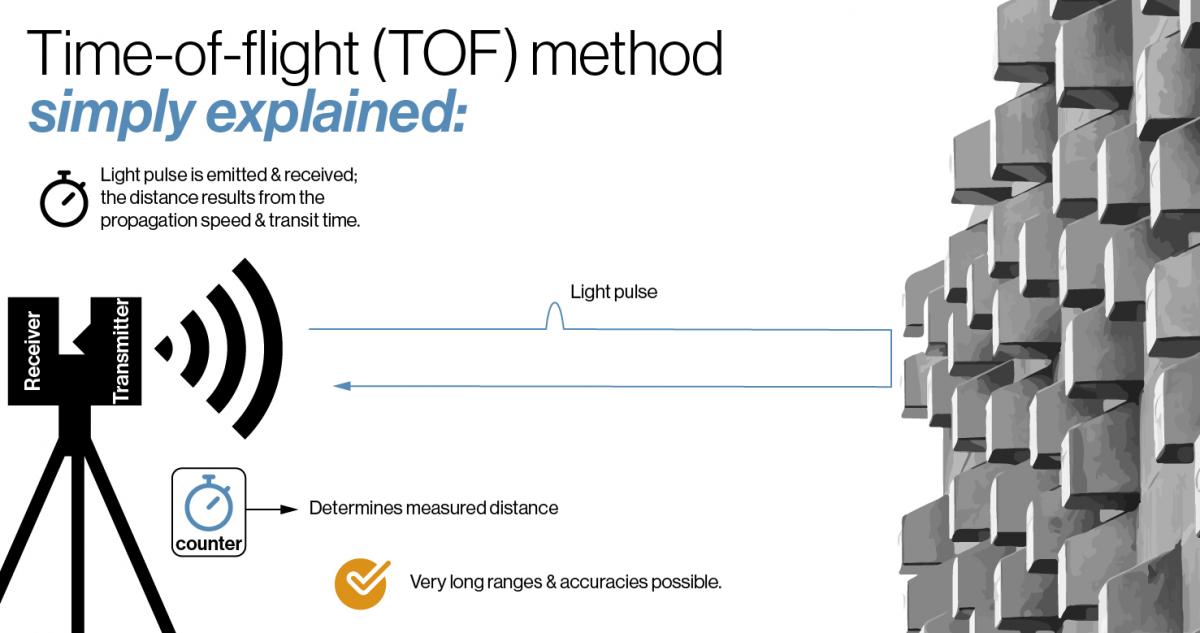
In the time-of-flight method, measurement pulses are modeled on a carrier wave and the time between transmission and reception is measured by the laser scanner. The distance can be derived from the runtime. The advantages of the TOF method are the long ranges and the greater eye safety of these laser scanners. Accordingly, the strengths of pulse laser scanners lie in measuring long distances.
Phase based method (Amplitude modulated continuous wave (AMCW))
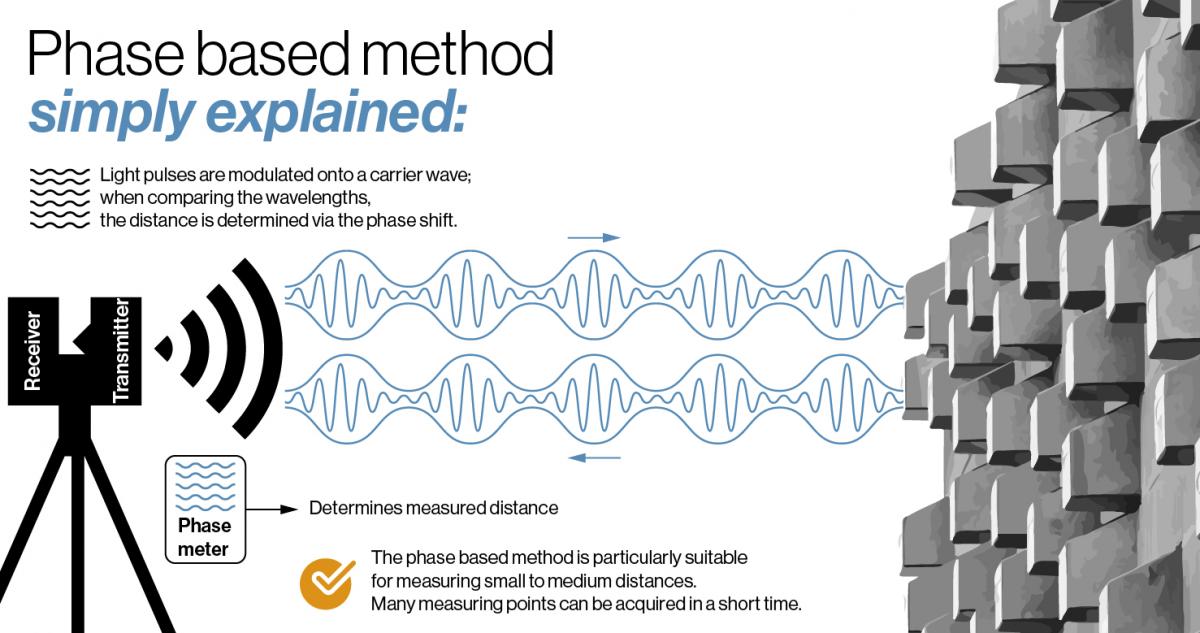
In the phase based method, waves emitted by the laser scanner with different wavelengths are compared with each other and the displacement is determined via the phase shift. The advantages of the phase based method are the very high measurement speed, the higher accuracy and the resolution. The method is particularly suitable for the detection of complex contiguous geometries with limited range.
Which scanner uses which method?
Time-of-flight (TOF) method





Phase based method




Colored point clouds
In addition, colored laser scanner images can also be taken. For this purpose, images are created by an internal or external camera and calculated on the point cloud generated by the scanner. In the process, color information (RGB) is assigned to each measured point, which is spatially defined by x, y, and z. The quality of the results depends on the acquisition configuration and the camera calibration. For laser scanners with an external camera, the acquisition centers of the camera and the laser scanner are not identical. This deviation must be corrected mechanically or by calculation. Other laser scanners have the camera built into the beam path of the laser.
Overview of manufacturer







Sample project:
Scanning of a villa in the canton of Ticino for a rehabilitation concept & a virtual tour
Some time ago, we had a special scanning training in wonderful late summer weather in beautiful Ticino (Switzerland).
Mr. Tobias Jörn of homebase2 GmbH from Zurich/Hanover had commissioned us with the three-day training. The goal was to three-dimensionally capture a stately villa from the early 20th century and the surrounding magnificent garden.

Get in touch:
+49 391 62 69 960 | +49 7153 66 29 112 | +49 202 62 93 39 29
Write us an email:





