Handscanner-Daten und Daten von einem terrestrischen Laserscanner zusammenführen

TitleWarum einen terrestrischen und handgeführten 3D-Scanner kombinieren?
Jeder, der schon mit einem terrestrischen Laserscanner gearbeitet hat, kennt die unterschiedlichen Herausforderungen dabei. Es gibt immer wieder Bereiche, die Sie mit einem terrestrischen Laserscanner, wie zum Beispiel von Leica, Trimble, Z+F und FARO, auf Grund der Größe oder Erreichbarkeit des Messobjekts oder aus Zeitmangel nicht erfassen können.

Zur Erfassung dieser fehlenden Bereiche gibt es zwei Möglichkeiten: Die erste Möglichkeit wäre, dass die Bereiche von zusätzlichen Standpunkten aus gescannt werden. Jedoch werden dafür meist viele Standpunkte benötigt, die zu einem höheren Arbeitsaufwand führen und sich teilweise auch nicht technisch umsetzen lassen.
Die zweite Möglichkeit ist, die fehlenden Bereiche mit einem Handscanner, wie zum Beispiel mit dem DPI-8 der Firma DotProduct LLC, zu erfassen und dann beide Scandatensätze zusammen in einer Software (z. B. FARO Scene) zu bearbeiten.

TitleScan-Ablauf am Beispiel von FARO Focus3D und DotProduct DPI-8
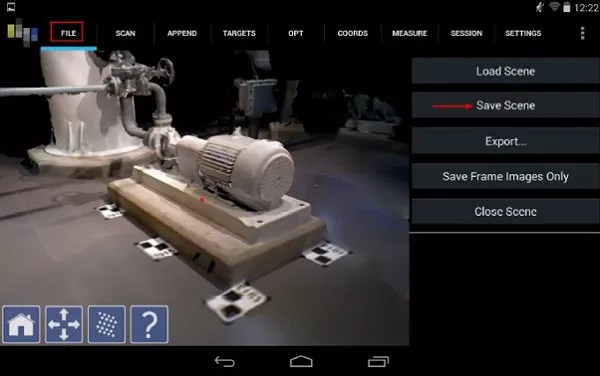
Die Vorgehensweise bei der Erfassung ist wie folgt: Wir scannen die weiträumigen Bereiche beispielsweise mit einem FARO-Laserscanner unter Verwendung von Zielmarken (Targets) wie Referenzkugeln oder Schachbrettzielmarken. In den verwinkelten Ecken oder verdeckten Bereiche, die nicht erfasst werden können, platzieren wir im optimalen Fall drei Zielmarken, um die Verknüpfung zwischen den Daten des Handscanners und den Daten des terrestrischen Scanners im Anschluss schnell herstellen zu können.
Während des Scan-Vorgangs oder im Anschluss können wir die Aufnahme mit dem Handscanner DPI-8 starten. Der Scanner benötigt ein paar Minuten, um sich und die Sensoren aufzuwärmen. Da es keine Temperatureinflüsse im weiteren Betrieb gibt, werden wesentlich präzisere Daten erfasst.
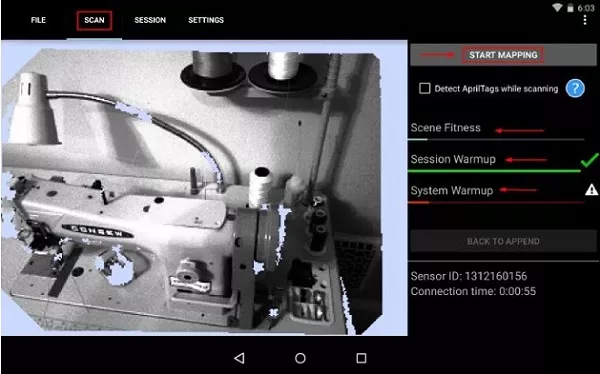
TitleAprilTags für genauere Scan-Ergebnisse mit dem DPI-8
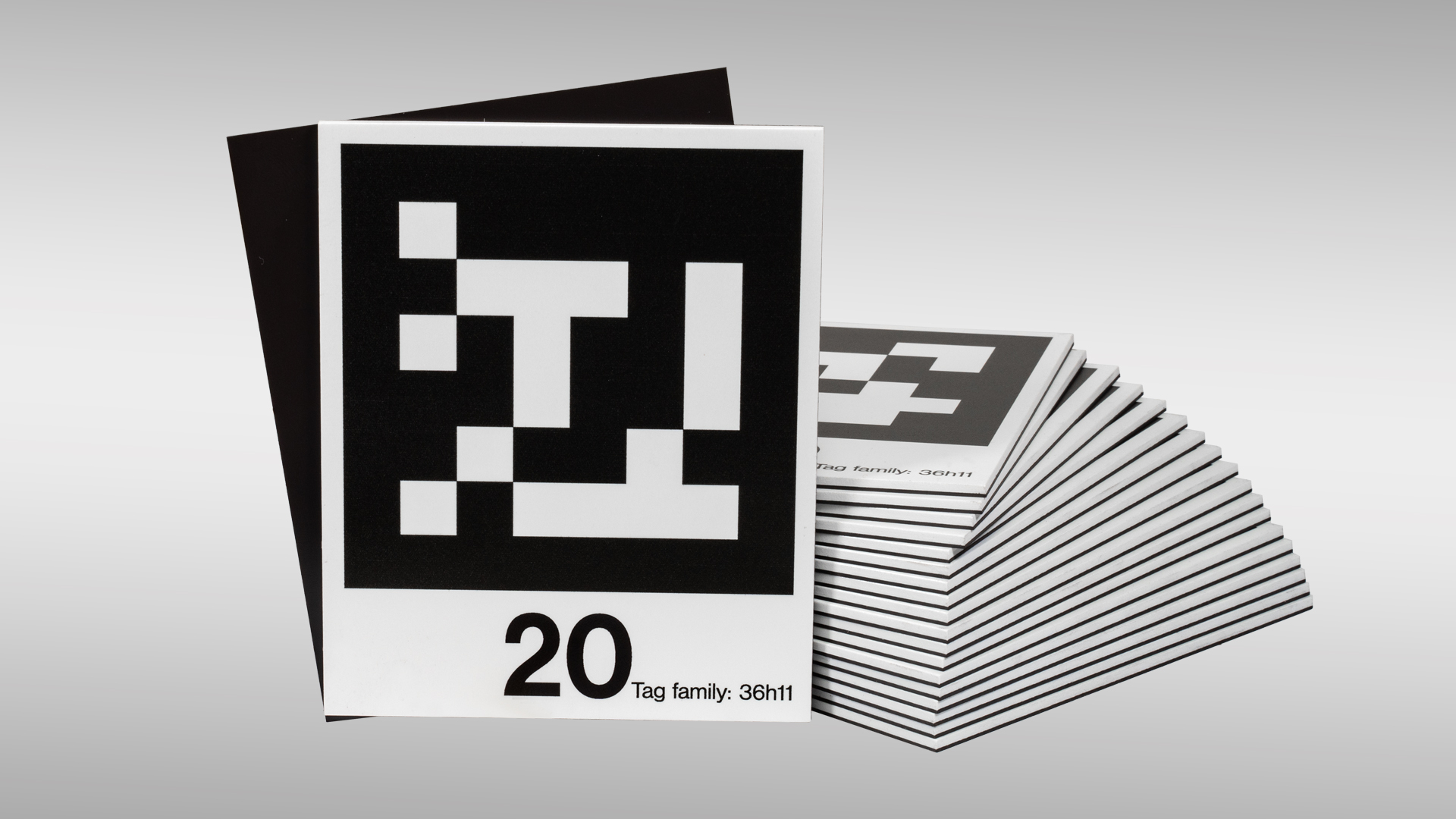
Je nach Größe des zu erfassenden Raumes kann es nötig sein, weitere Targets für den handgeführten Scanner DPI-8 anzubringen. Für den DPI-8 empfehlen wir die kostenlosen AprilTags von DotProduct. Die Software zum Scanner, welche direkt auf dem Tablet läuft, heißt Phi.3D. Die Phi.3D-Software erkennt die AprilTags automatisch während des Scanvorgangs.
AprilTags sind codierte 2D-Marken, die eine eindeutige Zuordnung ermöglichen. Nach dem Scannen mit dem DPI-8 werden die Scans automatisch stationiert und können sofort auf dem Tablet genutzt werden. Wir können uns dann in den Scans bewegen und bereits Messungen vornehmen. Außerdem empfehlen wir, das Koordinatensystem festzulegen, da somit die Positionierung der Punktwolke ins CAD-System eindeutiger ist. Wird die Punktwolke allerdings auf ein vorhandenes Modell ausgerichtet, kann dieser Schritt vernachlässigt werden.
Stationierung von FARO und DPI-8 Scans
Für die Stationierung mit den FARO Scans in Scene ist die Festlegung des Koordinatensystems nicht notwendig. Wir exportieren die Scans im Format *.pts - mit dem Aufbau in x-Wert, y-Wert, z-Wert und Reflexionswert. Diese Datei benennen wir dann in die Endung *.xyz um. Danach können wir die registrierten Handscanner-Daten über "Drag&Drop" in ein vorhandenes FARO Scene Projekt importieren.
Die Scans vom FARO-Scanner als auch vom DPI-8 können jetzt über die verschiedenen Stationierungstools in Scene zusammengerechnet werden.
Es gibt verschiedene Möglichkeiten Scans in FARO Scene der Version 5 zu stationieren. Dazu gibt es einen weiteren Beitrag unter:
Export der Scandaten für die Weiterverarbeitung
Nachdem wir alle Daten miteinander verknüpft haben, können wir die Punktwolken für die Weiterverwendung in unserer gewünschten CAD-Software wie z. B. AutoCAD, Revit, Rhino oder MicroStation exportieren oder auch direkt in FARO Scene 5.5 messen und uns durch die Punktwolke bewegen.
Durch die Kombination zweier unterschiedlicher Messverfahren können wir wirtschaftlich alle Bereiche erfassen. Trotz der Verwendung von zwei Scannern können wir in nur einer Auswertesoftware arbeiten, wodurch keine weiteren Schulungen erforderlich sind und die Projekte wie gewohnt bearbeitet werden können.