Vergleich: Verfahren zur dreidimensionalen Verknüpfung von Gebäudeinnenräumen untereinander sowie Innen- und Außenräumen

TitleMobile 3D-Vermessung: Vergleich von Punktwolken- und Bildverfahren in der Masterarbeit
Im Zuge ihrer Masterarbeit im Studiengang Vermessung an der Hochschule für Technik Stuttgart testete Theresa Möhnle verschiedene mobile Verfahren für die dreidimensionale Verknüpfung von Innenräumen untereinander sowie von Innen- und Außenräumen. Für die geometrische 3D-Modellierung sollten mobile Verfahren für die Erzeugung von Punktwolken und Bilddaten genutzt und die Ergebnisse verglichen werden. Hierbei standen das bildgebende Verfahren und ein mobiler Laserscanner im Vordergrund. Die Aufnahme mit einem terrestrischen Laserscanner diente als Vergleichsgrundlage.
Als Testobjekt für diese Masterarbeit wurde der Bau 2 der Hochschule für Technik Stuttgart gewählt. An diesem Gebäude sollten die verschiedenen Verfahren angewandt und getestet werden. Dafür wurden speziell die Außenfassade des Gebäudes und die einzelnen Räume des zweiten Stockwerks erfasst.
Welche Geräte und welche Software wurden für den Vergleich herangezogen?
Die Aufnahmen für das bildgebende Verfahren wurde mit der Kamera CANON EOS 750D durchgeführt. Die Auswertung erfolgte über die Software Agisoft Photogrammetric Kit Professional for TOPCON.
Als mobiler Laserscanner wurde der ZEB-REVO RT+CAM von GeoSLAM genutzt, der von der Laserscanning Europe GmbH zur Verfügung gestellt wurde.
Des Weiteren wurde als Vergleich der terrestrische Laserscanner Leica BLK360 mit der Autodesk ReCap App auf dem iPad verwendet. Diese Punktwolke sollte als Grundlage für den Vergleich dienen.
Die Punktwolken der drei Verfahren werden in der Software Autodesk Revit näher betrachtet und miteinander verglichen.
Das bildgebende Verfahren
Der Flur des zweiten Stocks und die zwei angrenzende Räume wurden in einem Abstand von ca. 3 m mit drei Aufnahmeebenen pro Standpunkt aufgenommen. In den Verknüpfungspunkten (Türen und Fenster) wurden mehrere Aufnahmen mit großer Überlappung gemacht.
Vorbereitungen wurden bei diesem Verfahren nicht direkt getroffen. Die optimalen Einstellungen der Kamera und die Aufnahmekonfigurationen wurden durch mehrere Messungen optimiert. Vor jeder Messung wurden hierbei die Verknüpfungspunkte geöffnet.


Der mobile Laserscanner ZEB-Revo RT
Aufnahme mit dem ZEB-REVO RT+CAM
Vor Beginn der Messung wurden einige Vorbereitungen getroffen. Um optimale Scanergebnisse zu erhalten, wurden zunächst der abzulaufende Weg, genauer gesagt die einzelnen Schleifen, geplant. Hierfür mussten die aufzunehmenden Gebäudebereiche festgelegt und die Schleifen hinsichtlich der zeitlich begrenzten Aufnahme von 30 Minuten geplant werden. Des Weiteren musste diese Planung die Schließung der Schleife am Startpunkt beinhalten.
Ferner wurde kurz vor der Messung die Schleife ohne Scanner durchlaufen und auf geeignete Merkmale geachtet. Waren diese nicht ausreichend vorhanden, wurden Objekte in die Gebäudebereiche, wie tunnelartige Flure, eingebracht.
Das Verbinden der einzelnen Geräteteile und die Verknüpfung mit dem Tablet sind einfach und benutzerfreundlich, sodass auch fachfremde Personen den Umgang schnell erlernen können. Hierbei sind auch die bereitgestellten Bedienungsanleitungen hilfreich. Als Anfangs- und Endpunkt bietet sich ein etwas erhöhtes flaches Objekt an, das stabil steht. Hierfür eignet sich beispielsweise ein Tisch oder ähnliches. Im Anschluss wird die Initialisierung des Systems durchgeführt und die Messung kann begonnen werden.
Auf dem Tablet des ZEB-Revo RT können die Messungen in Echtzeit betrachtet werden, was sehr hilfreich für die Aufnahme ist. So können explizit wichtige Merkmale an Nischen und ähnliches aufgenommen werden, indem der Bediener die Aufnahmegeschwindigkeit verlangsamt oder den Scanner in diese Richtung hält.
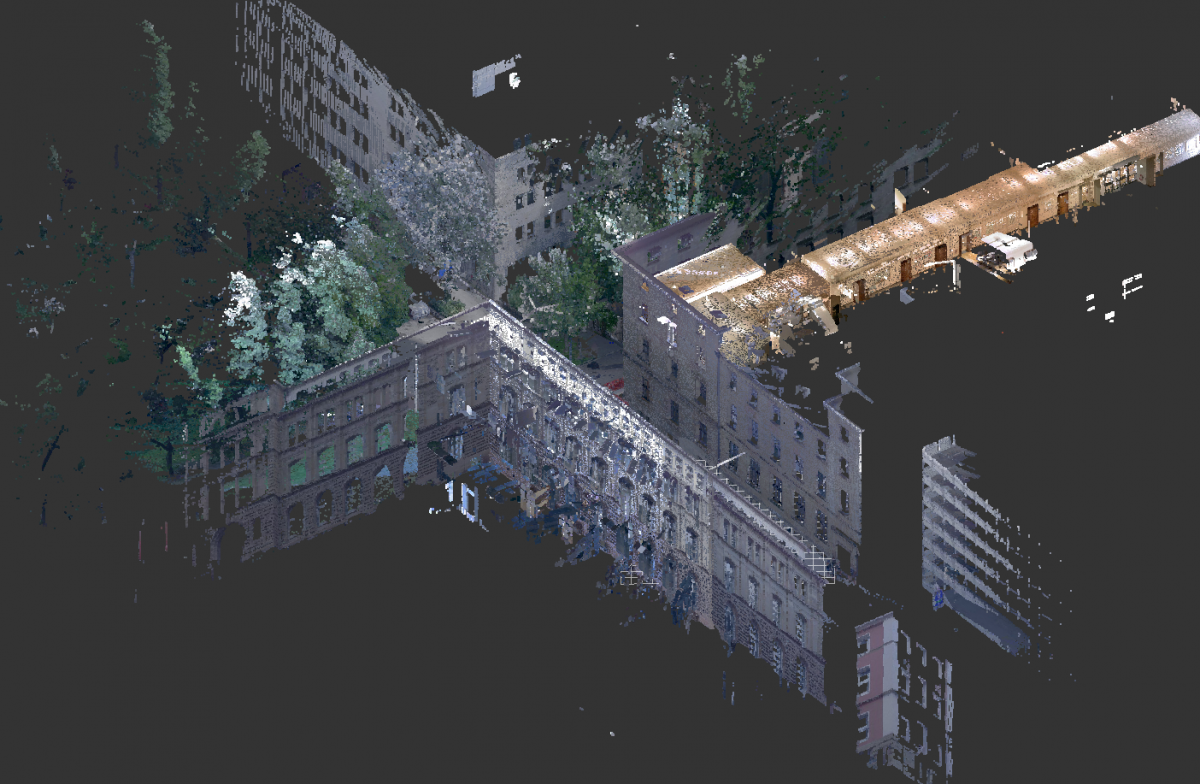
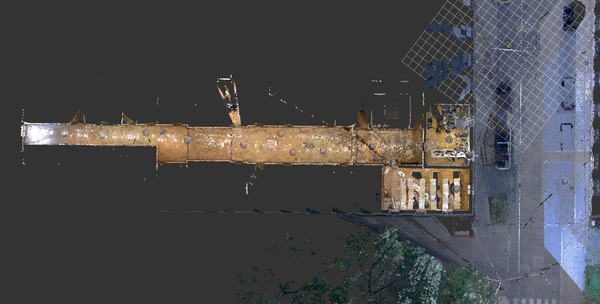
Für die Aufnahme der Außenfassade des Gebäudes wurde der Scannerkopf in Richtung der Fassade gehalten, sodass dieser die Details der Fassade und Objekte, wie Autos oder Verkehrsschilder, als Merkmale erkannt. Außerdem muss die Laufgeschwindigkeit an den Gebäudeecken verringert werden, damit sich auf beiden Fassadenseiten befindliche Merkmale erkannt werden. Auch bei den geöffneten Außentüren bzw. Innentüren muss die Geschwindigkeit verringert und die Türen rückwärts durchlaufen werden, sodass der Scanner Zeit hat, Merkmale auf beiden Seiten der Tür zu erfassen.
Im Vergleich zum terrestrischen Laserscanning wird die Aufnahmezeit erheblich verringert, da beim mobilen Laserscanning keine Scanner-Standpunkte und Passpunkte festgelegt werden müssen. So konnten die Außenfassade und das Erdgeschoss, sowie das erste und zweite Stockwerk mit einigen Räumen und drei Treppenhäuser in insgesamt 60 Minuten aufgenommen werden.
Auswertung in GeoSLAM Hub
Nachdem eine Messung beendet wurde, können die Daten durch Verbindung des Scanners beispielsweise mit einem Laptop heruntergeladen werden. Hierbei stehen zwei Formate zur Verfügung: zum einen die Datei *.ply, die 9% der Punkte enthält, einen ersten Eindruck vermittelt und zur Kontrolle genutzt werden kann; zum anderen die Datei *.geoslam, die für die weitere Auswertung in GeoSLAM Hub genutzt wird.
Die Auswertung der Daten erfolgt ebenso schnell und benutzerfreundlich wie die Aufnahme. Hierbei kann durch Drag&Drop die *.geoslam-Datei in GeoSLAM Hub importiert werden. Danach stehen zahlreiche Möglichkeiten zur Verfügung. Die entpackten Dateien können gespeichert und im GeoSLAM Viewer oder in GeoSLAM Draw betrachtet werden. Außerdem können zusätzliche Ausgabeformate erstellt und eine neue Prozessierung der Daten durchgeführt werden. Durch diese Möglichkeiten können Daten in typischen Punktwolkenformaten wie *.e57 oder*.ply gespeichert werden. Des Weiteren lassen sich verschiedene Einstellungen hinsichtlich der Punktwolke vornehmen. Dadurch wird eine optimale Weiterverarbeitung in verschiedenen Softwarelösungen oder Anwendungen ermöglicht.
Wurde während der Aufnahme ein Video erzeugt, kann die Punktwolke koloriert werden. Hierbei werden die Daten in Kombination mit dem Video erneut prozessiert und die Punktwolke kann im gewünschten Format gespeichert werden. Diese Auswertezeit verlängert sich durch die erhöhte Datengröße.
Um die einzelnen Scans zu verknüpfen, bietet GeoSLAM Hub die Funktion Data Set Merger. Die Daten werden ausgerichtet und zusammengeführt. Voraussetzung hierfür ist die Grobausrichtung, bei denen die Scans zueinander verschoben werden. Durch einen Merge-Algorithmus kann danach die Registrierung der Punktwolken erfolgen.
GeoSLAM Viewer
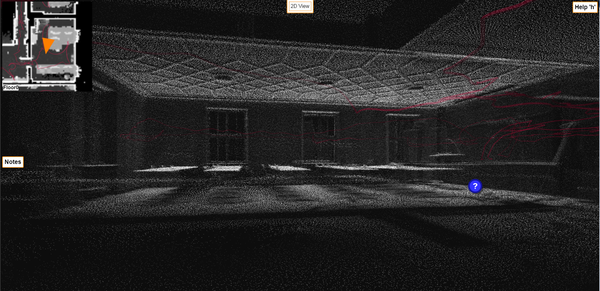
Die Ergebnisse der Auswertung können über die Software GeoSLAM Viewer betrachtet werden. Der Anwender kann sich entlang der Trajektorie im zweidimensionalen oder dreidimensionalen Raum bewegen und einzelne Details näher betrachten und überprüfen. Falls während der Aufnahme eine Videodatei erstellt wurde, wird die Ansicht der Merkmale durch einzelne Bilder unterstützt.
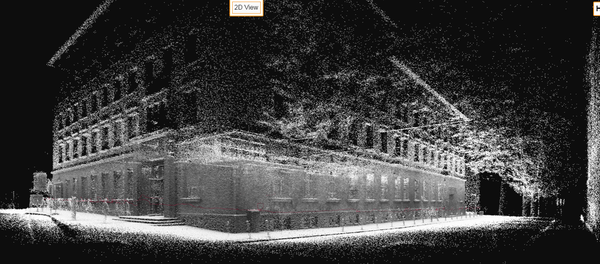
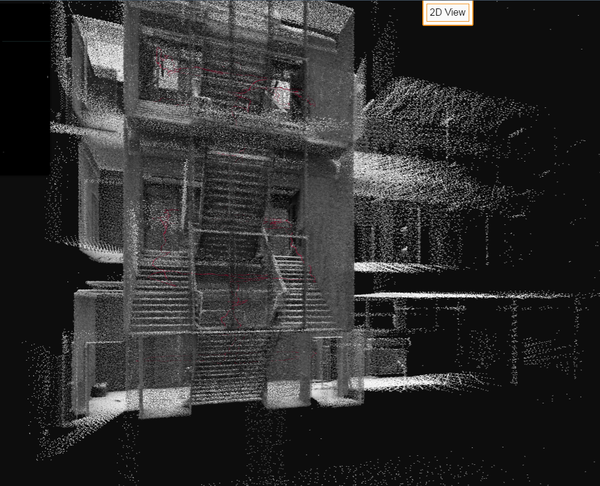
In den folgenden Abbildungen werden einige Beispiele des zweiten Stockwerks gezeigt. Im linken Bild ist der Stuck im Vorlesungssaal gut erkennbar. Im rechten Bild können die Wandvorsprünge, Türen und auch Bilder, die sich an den Wänden befinden, betrachtet werden.

Der terrestrische Laserscanner Leica BLK360
Beim terrestrischen Laserscanning war zunächst eine Planung der ungefähren Standpunkte des Scanners notwendig. Außerdem mussten Überlegungen hinsichtlich der Verknüpfung über die Fenster und Türen getätigt werden. Die Scanner-Einstellungen wurden über das iPad in der Autodesk ReCap App ausgewählt. Vor der Messung wurden zudem die Türen und Fenster geöffnet. Außerdem wurde darauf geachtet, dass wenige Personen zum Zeitpunkt der Messung vor Ort waren.
Der Außenbereich des Gebäudes wurde über drei Scans und der Teilereich des zweiten Stockwerks mit 17 Scans aufgenommen. Die Verbindung von Außen- und Innenräumen wurden beim terrestrischen Verfahren über die Fenster durchgeführt.

Vergleich der Punktwolken der 3 Verfahren
Der Vergleich der Punktwolken aus den einzelnen Verfahren erfolgt über die Software Autodesk Revit. Dort besteht die Möglichkeit, aus den Punktwolken 3D-Modelle für BIM (Building Information Modeling) zu modellieren. Durch verschiedene Funktionen in dieser Software können Grundrisse und Schnitte erstellt werden, die dann zum Vergleich der einzelnen Verfahren genutzt wurden.
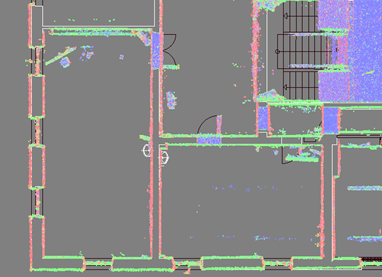
Zunächst wurden aus den einzelnen Punktwolken Grundrisse erstellt und optisch miteinander verglichen. Dabei konnte festgestellt werden, dass die Punktwolke aus dem bildgebenden Verfahren sehr viele Knicke und Bögen in den Wänden aufweist. Diese Verzerrungen entstanden an den strukturarmen Bereichen und aufgrund der Verknüpfungsart der einzelnen Wandteile.
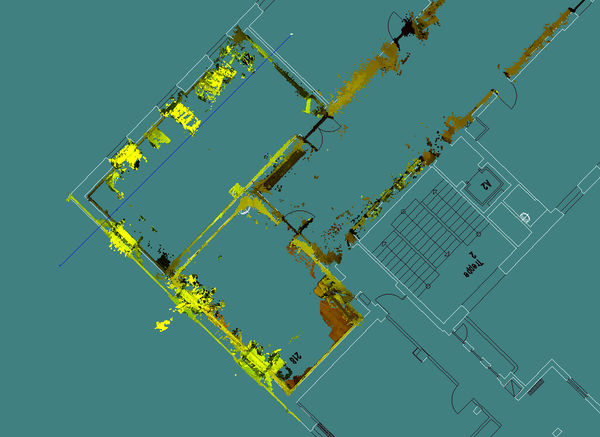
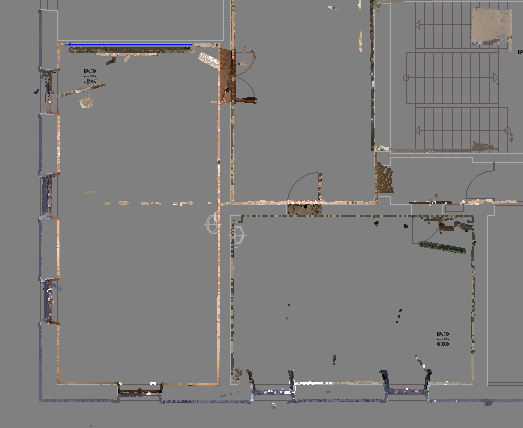
Der Grundriss aus der Messung mit dem ZEB-REVO RT+CAM liegt optisch auf dem zuvor importiertem CAD-Grundriss des Stockwerks. Durch den Abgleich der Positionen der Türen, Fenster und Wände zeigten sich keine groben Fehler, wie in der folgenden Abbildung ersichtlich ist.
Um einen genauen Vergleich der drei Verfahren zu erhalten, wurden einzelne Wandstärken, Raumbreiten und -längen durch mehrere Schnittbildungen bestimmt.
Auch hier werden zunächst die Schnitte optisch miteinander verglichen. Dabei wird zunächst die Außenfassade betrachtet (in der folgenden Abbildung jeweils die linke Linie). Diese ist beim bildgebenden Verfahren sehr viel dichter und weist im Vergleich zum mobilen Laserscanner ein geringeres Rauschen auf. Die geringe Punktdichte und das gewisse Rauschen in der Außenfassade des ZEB-REVO RT+CAM werden durch die Entfernung des zweiten Stockwerks zur Aufnahmeebene (Boden) und durch den spitzen Aufnahmewinkel verursacht. Die Punktwolke des Leica BLK360 weist ein geringes Rauschen und hohe Punktdichte auf.
Auch die Innenwände der drei Verfahren (jeweils rechte Linie) sind sehr unterschiedlich. Im linken Bereich der Abbildung ist zu erkennen, dass ein strukturarmer Bereich (oben) ein sehr hohes Rauschen oder sogar Löcher in der Punktwolke verursacht. Dabei kann dort keine Wandstärke mehr ermittelt werden. Die Wand, der Boden und die Decke werden im Gegensatz dazu durch den ZEB-REVO RT+CAM erfasst (mittlere Darstellung in der folgenden Abbildung). Ein gewisses Rauschen an den Innenwänden von ca. 3 cm ist bei allen Schnitten zu beobachten, was für die Wanddefinition jedoch nicht ausschlaggebend ist. Die Punktwolke des terrestrischen Verfahrens bildet - abgesehen von Verdeckungen - alle Gegenstände, Wände, Decken und Böden vollständig ab. Auch das Rauschen ist gering.
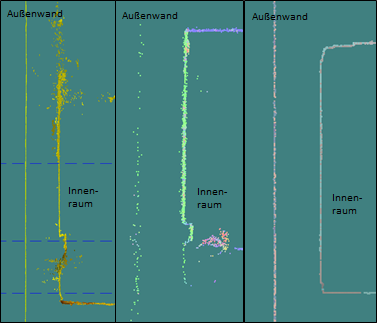
Bildgebendes Verfahren (links),
mobiler Laserscanner (Mitte),
terrestrisches Verfahren (rechts)">
Wenn die einzelnen Maße der drei Ergebnisse miteinander verglichen werden, fällt auf, dass sich das bildgebende Verfahren deutlich von den anderen beiden Verfahren unterscheidet. Die Raumbreiten und -längen weichen bis zu 13 cm voneinander ab. Abweichungen bei den einzelnen Wandstärken sind geringer und liegen bei max. 3 cm.
Im Vergleich liegen die Maße des terrestrischen und des mobilen Laserscanners sehr eng beieinander. Differenzen in den Räumen liegen bei ca. 1 cm und die maximale Abweichung bei den Wandstärken beträgt ca. 1,5 cm. Hierbei darf jedoch nicht außer Acht gelassen werden, dass viele Maße für die Außenwand beim mobilen Laserscanner nicht bestimmt werden konnten. Dies liegt, wie bereits beschrieben, an der geringen Punktdichte im zweiten Stockwerk. Um die äußeren Wandstärken zu bestimmen, muss diese Ermittlung im Erdgeschoss oder im ersten Stockwerk vorgenommen werden.
In Berücksichtigung der Genauigkeit, des Aufwands und der Zeit für das Messen und Auswerten kann schlussfolgernd die Punktwolkenerstellung durch den ZEB-REVO RT+CAM als brauchbare Alternative zum terrestrischen Scannen beurteilt werden. Die zuvor beschriebenen Probleme bei der Bestimmung der Außenwandstärke können durch die Ermittlung im Erdgeschoss stattfinden, da für die Erstellung eines 3D-Modells in Hinblick auf BIM das gesamte Gebäude dokumentiert werden muss. Auch das höhere Rauschen bei diesem Verfahren stellt, wenn eine gewisse Punktdichte vorhanden ist, keine Probleme dar. Die Wand kann durch das Abschätzen der Mitte des Rauschens durch den Anwender definiert werden.
Die Scanner von GeoSlam sind nicht mehr erhältlich. Wir bieten Technik der neuen Generation an. Fragen Sie uns, falls Sie Fragen haben.
Schauen Sie sich auch gerne unser Angebot terrestrischer Scanner an.