Apache 3
TitleApache 3
Das APACHE 3 ist ein kompaktes, leicht transportierbares unbemanntes Oberflächenfahrzeug (USV) mit geringem Tiefgang, das speziell für bathymetrische Vermessungen in Seen, Flüssen und küstennahen Gewässern entwickelt wurde. Ausgestattet mit einem Einstrahl-Echolot ermöglicht es präzise Tiefenmessungen. Durch die zuverlässige 4G-Datenverbindung, ein duales GNSS-System zur Positions- und Kursbestimmung, einen integrierten IMU-Sensor sowie leistungsstarke Antriebseinheiten kann das APACHE 3 auch bei anspruchsvollen Strömungsverhältnissen autonom entlang definierter Routen navigieren und dabei eine exakte sowie effiziente Datenerfassung sicherstellen.
TitleOptimierte Konstruktion und Haltbarkeit
Der Rumpf des APACHE 3 wird aus Kohlefaser gefertigt und in einem Stück geformt, wodurch eine Festigkeit von bis zu 10 MPa erreicht wird und die Widerstandsfähigkeit gegenüber Kollisionen deutlich gesteigert ist. Eine zusätzliche Aluminiumabdeckung verstärkt die Struktur und reduziert mögliche Verformungen bei mechanischer Belastung. Beim APACHE 3 Pro kommt ein weiterentwickelter Doppelrumpf aus einer hochwertigen Kombination von Kohlefaser und Kevlar zum Einsatz, der eine noch höhere Robustheit und Lebensdauer bietet. Durch die optimierte Bauweise ist das APACHE 3 zudem leichter als frühere Modelle, sodass es problemlos von einer einzelnen Person transportiert und eingesetzt werden kann.

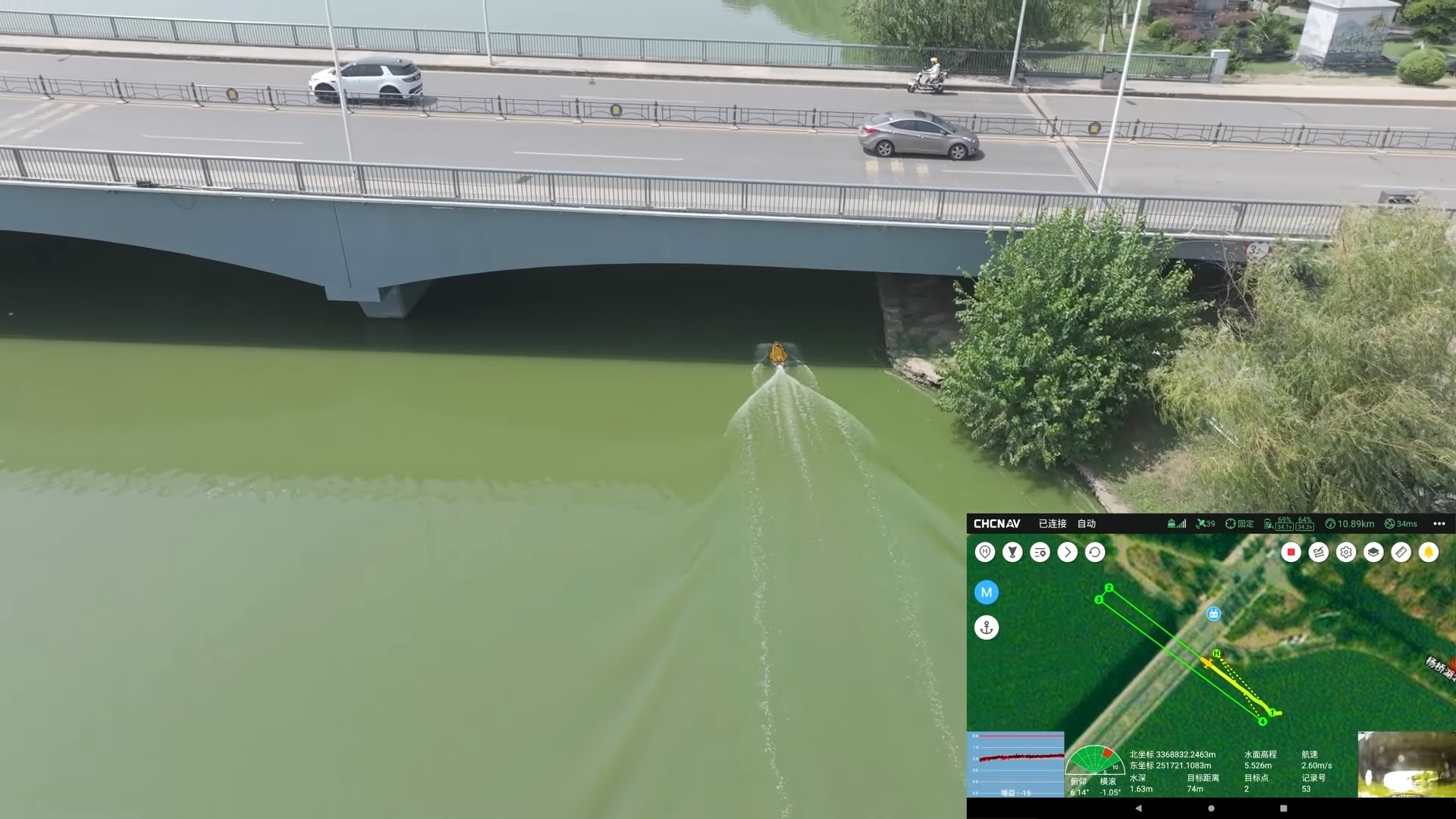
TitleHohe Genauigkeiten unter Brücken und bei Hindernissen

Ein integrierter IMU-Sensor ermöglicht die Überbrückung kurzzeitiger GNSS-Signalausfälle. Die Kombination aus GNSS- und IMU-Daten sorgt für präzise Positions- und Lageinformationen und gleicht Bewegungen des Boots zuverlässig in den Messergebnissen aus. Dadurch liefert das APACHE 3 selbst bei der Durchfahrt unter Brücken oder in Bereichen mit eingeschränktem GNSS-Empfang kontinuierlich genaue Positionsdaten. Die enge Verzahnung von GNSS- und INS-Technologie minimiert Messabweichungen und verhindert Ausreißer. Beide Modelle nutzen GNSS RTK, während die Pro-Version zusätzlich über eine weiterentwickelte INS-Integration verfügt, die insbesondere in abgeschatteten oder hindernisreichen Umgebungen für eine noch stabilere Positionsbestimmung sorgt.
TitleVermessung unter schwierigen Wasserbedingungen
Das APACHE 3 verfügt über ein leistungsoptimiertes Antriebssystem. Das halbversenkte Motorkonzept schützt die Antriebseinheiten effektiv und reduziert das Risiko von Schäden, insbesondere in flachen Gewässern. Fortschrittliche Bathymetrie-Algorithmen ermöglichen eine automatische Anpassung relevanter Parameter, sodass auch in sich verändernden Flussbetten und unter unterschiedlichen Umweltbedingungen verlässliche Messergebnisse erzielt werden können.

TitleEinstrahl-Echolot für bathymetrische Vermessungen

Standardmäßig ist das APACHE 3 mit dem Einstrahl-Echolot D230 ausgestattet, während beim APACHE 3 Pro das leistungsfähigere D270 zum Einsatz kommt. Das D270 zeichnet sich durch eine kompaktere Bauform aus und verfügt zusätzlich über einen integrierten Sensor zur Messung der Wassertemperatur. Dadurch können temperaturbedingte Änderungen der Schallgeschwindigkeit in Echtzeit berücksichtigt werden, was die Genauigkeit der Tiefenmessungen weiter verbessert und auch unter variierenden Umweltbedingungen zuverlässige bathymetrische Daten liefert.

TitleTypische Anwendungen für das Apache 3
Der APACHE 3 wird in einer Vielzahl hydrologischer und wasserbaulicher Aufgaben eingesetzt. Durch die Kombination aus autonomer Navigation, integrierter Sensorik und stabiler Fahrdynamik eignet sich das System sowohl für Routineuntersuchungen als auch für komplexe Analysen in dynamischen Gewässerbereichen.
Die folgenden Anwendungsfelder zeigen typische Einsatzmöglichkeiten des Fahrzeugs.
Bathymetrische Vermessungen
Das APACHE 3 wurde speziell für präzise bathymetrische Vermessungen in unterschiedlichsten Gewässertypen entwickelt. Mit seinem integrierten Einstrahl-Echolot ermöglicht es eine zuverlässige Erfassung von Tiefenprofilen in Seen, Flüssen und küstennahen Bereichen. Durch die autonome Navigation entlang vordefinierter Messlinien können auch größere Flächen effizient und systematisch aufgenommen werden. Die Kombination aus GNSS-Positionierung und IMU-Unterstützung sorgt dabei für konsistente und genaue Messergebnisse – selbst unter anspruchsvollen Einsatzbedingungen.
Vermessung von Navigationskanälen
Für die Kontrolle und Instandhaltung von Navigationskanälen liefert das APACHE 3 eine effiziente Lösung zur regelmäßigen Tiefenüberwachung. Versandungen, Ablagerungen oder Veränderungen im Gewässerbett können frühzeitig erkannt und dokumentiert werden. Dank seiner präzisen Spurführung und stabilen Datenaufzeichnung eignet sich das System ideal für wiederkehrende Kontrollmessungen, die eine sichere Befahrbarkeit von Wasserstraßen gewährleisten. Besonders in sensiblen oder schwer zugänglichen Bereichen spielt das kompakte, unbemannte System seine Vorteile aus.
Kartierung von Flussbetten
Das APACHE 3 unterstützt die detaillierte Kartierung von Flussbetten und ermöglicht die Analyse morphologischer Veränderungen über die Zeit. Durch die hochgenaue Erfassung von Tiefendaten lassen sich Erosion, Sedimentablagerungen und strukturelle Veränderungen zuverlässig dokumentieren. Dies ist insbesondere für wasserwirtschaftliche Fragestellungen, Bauprojekte oder ökologische Bewertungen von Bedeutung. Auch in dynamischen Fließgewässern sorgt die robuste Sensorintegration für stabile und nachvollziehbare Ergebnisse.
Überwachungsmessungen an Talsperren und Stauanlagen
Das APACHE 3 eignet sich ebenfalls für die regelmäßige Überwachung von Talsperren und Stauanlagen im Rahmen bathymetrischer Untersuchungen. Dabei können Veränderungen am Gewässergrund, wie Sedimentablagerungen oder Auskolkungen, systematisch erfasst und über längere Zeiträume dokumentiert werden. Diese Daten bilden eine wichtige Grundlage für die Bewertung der Betriebssicherheit und die Planung von Instandhaltungsmaßnahmen. Aufgrund der fehlenden ADCP-Technologie liegt der Fokus hierbei auf der Tiefenmessung und nicht auf der Analyse von Strömungsverhältnissen oder Durchflussmengen.

TitleZuverlässige Vermessung mit dem Apache 3
Das APACHE 3 ist ein autonom arbeitendes Vermessungsboot, das speziell für bathymetrische Datenerfassung in Gewässern entwickelt wurde. Durch die Kombination aus präziser GNSS-Positionierung, inertialer Sensorik und integriertem Echolot ermöglicht das System eine zuverlässige Aufnahme von Tiefendaten entlang definierter Messprofile. Die autonome Navigation sowie die kontinuierliche Datenübertragung sorgen dabei für einen effizienten und sicheren Vermessungsprozess – auch unter anspruchsvollen Bedingungen.
TitleGenerelle Funktionsweise
Das APACHE 3 folgt vordefinierten Messlinien automatisch und erfasst dabei kontinuierlich Tiefen- und Positionsdaten. Die Steuerung erfolgt über eine Planungssoftware, in der die Messrouten vorab definiert werden. Während der Fahrt kombiniert das System GNSS- und IMU-Daten, um eine stabile Navigation und genaue Positionsbestimmung sicherzustellen – selbst bei kurzzeitigen Signalabschattungen. Parallel dazu liefert das integrierte Einstrahl-Echolot präzise Tiefeninformationen, die direkt georeferenziert gespeichert werden.

TitleAblauf eines Vermessungsprojekts
1. Projektplanung & Missionsvorbereitung
Zu Beginn werden die Vermessungsparameter festgelegt und das Messgebiet in der Planungssoftware definiert. Hierbei werden die Fahrtrouten (Tracklines) entsprechend der gewünschten Auflösung und Genauigkeit erstellt. Anschließend wird das APACHE 3 für den Einsatz vorbereitet, einschließlich Systemcheck, Kalibrierung und Einrichtung der GNSS-Verbindung.

2. Systemeinsatz & autonome Navigation
Nach dem Zuwasserlassen folgt das APACHE 3 automatisch den geplanten Messlinien. Dank der integrierten GNSS- und IMU-Technologie bleibt das System auch bei Strömung, Wind oder kurzzeitigem GNSS-Verlust stabil auf Kurs. Im Gegensatz zu Systemen mit ADCP liegt der Fokus dabei vollständig auf einer exakten Linienführung zur flächenhaften Tiefenerfassung – nicht auf Querprofilfahrten zur Strömungsmessung.
3. Datenerfassung & Qualitätssicherung
Während der Fahrt werden kontinuierlich Tiefendaten über das Echolot sowie Positions- und Lageinformationen aufgezeichnet. Die Datenübertragung erfolgt in Echtzeit, sodass der Bediener den Fortschritt überwachen und bei Bedarf Anpassungen vornehmen kann. Die stabile Sensorintegration sorgt dafür, dass Messfehler minimiert und konsistente Datensätze erzeugt werden – auch in dynamischen Gewässern.

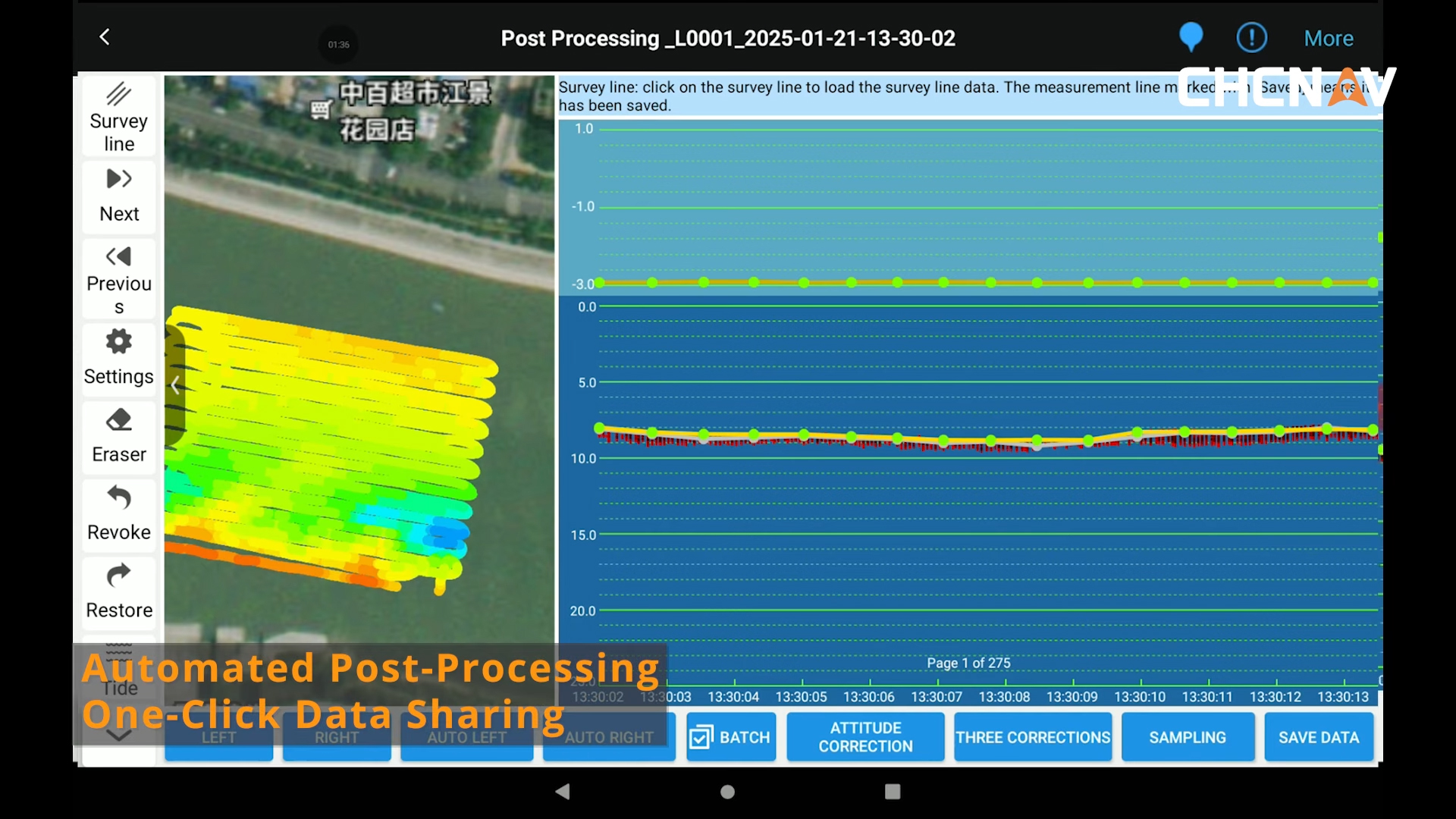
4. Datenverarbeitung & Auswertung
Nach Abschluss der Messung werden die erfassten Daten weiterverarbeitet und analysiert. Dabei entstehen detaillierte Tiefenmodelle, Querprofile oder Volumenberechnungen. Diese Ergebnisse dienen als Grundlage für wasserwirtschaftliche Analysen, Monitoring-Aufgaben oder Planungsprozesse. Im Unterschied zu ADCP-basierten Systemen konzentriert sich die Auswertung beim APACHE 3 auf die Bathymetrie und nicht auf Strömungs- oder Abflussparameter.
TitleFlexible Steuerung: Manuell & autonom kombinierbar
Neben dem autonomen Betrieb kann das APACHE 3 jederzeit auch manuell gesteuert werden. Diese Funktion wird insbesondere beim Zuwasserlassen, in schwer zugänglichen Bereichen oder zur gezielten Ergänzung von Messdaten genutzt. Der Bediener kann das System flexibel navigieren, um beispielsweise Hindernisse zu umfahren oder spezifische Messpunkte anzufahren. In der Praxis wird die manuelle Steuerung häufig mit dem autonomen Modus kombiniert: Während die Hauptvermessung automatisiert entlang geplanter Linien erfolgt, ermöglicht die manuelle Kontrolle zusätzliche Flexibilität und maximale Effizienz im Feldeinsatz.


TitleSpezifikationen des Apache 3
Entdecken Sie die technischen Kernmerkmale des APACHE 3: Das kompakte und leistungsfähige USV-System überzeugt durch präzise Positionierung, zuverlässige Sensorintegration und eine stabile Messperformance für bathymetrische Anwendungen in unterschiedlichsten Gewässern.
Die folgenden Spezifikationen bieten Ihnen einen strukturierten Überblick über Konstruktion, Ausstattung und die wichtigsten technischen Leistungsdaten des Systems.
Produkteigenschaften
| Merkmale | Apache 3 Pro | Apache 3 |
|---|---|---|
| Größe (L x B x H) | 1050 mm x 550 mm x 390 mm | |
| Material | Hochfeste Kohlefaser + Kevlar-Verbund | Hochfeste Kohlefaser |
| Gewicht | 7 kg | |
| Maximale Traglast | 35 kg | |
| Wellen- und Windschutz | 3. Windstufe und 2. Wellenstufe | |
| Rumpfkonstruktion | Dreifach-Rumpf-Schiff | |
| Rumpfschutz | Ausgestattet mit Stoßschutzleisten | - |
| Wasserschutz | IP67 | |
| Tiefgang | 10 cm (unbeladen) | |
| Anzeigeleuchte | Zweifarbig (Positionierung und Differenzsignal) | |
| Kamera | 360°-Rundumvideo | |
| Abstand und Reichweite bei der Hindernisvermeidung | 0,2 – 40 m (H: 112°, V: 14°) | |
Technische Eigenschaften
| Merkmale | Apache 3 Pro | Apache 3 |
|---|---|---|
| Propellertyp | Bürstenloser Gleichstrommotor | |
| Richtungssteuerung | Kurskorrektur ohne Einsatz des Triebwerks | |
| Motorleistung | 800 W | |
| Max. Motordrehzahl | 7200 ± 5% RPM | |
| Motor Installation | Steckbar | |
| Li-Ionen-Akku-Kapazität | 32,4 V; 23,1 Ah | |
| Akku-Laufzeit | 10 Stunden bei 1,5 m/s (1 Batteriesatz, erweiterbar) | 7 Stunden bei 1,5 m/s (1 Batteriesatz, erweiterbar) |
| Stromversorgung | Unterstützung für einzelne/doppelte symmetrische Batterien | |
| Akku-Ladezeit | 3 h | |
| Max. Geschwindigkeit des Bootes | 7 m/s | 6 m/s |
Kommunikation
| Merkmale | Apache 3 Pro & Apache 3 |
|---|---|
| Datenkommunikation | Standard 4G und Fernbedienung |
| Fernbedienungsreichweite | 1 km (Remote); Unbegrenzt (4G) |
| SIM-Karten-Slot | Nano SIM |
| Reservierte Schnittstelle | 2x serielle RS232-Anschlüsse |
| Navigationsmodus | Manuell oder Autopilot |
| Datenspeicherung | Lokal (Mehrkanal) & Fernsteuerung |
| Software | Easysail |
Positioning
| Merkmale | Apache 3 Pro & Apache 3 |
|---|---|
| Satellitensystem | BDS B1I/B2I /B3I; GPS L1C/A/L2P(Y)/L2C/L5; Galileo E1/E5a/E5b; GLONASS L1/L2; QZSS L1/L2/L5 |
| Single Point Position (RMS) | Horizontal: 1,5 m; Vertikal: 2,5 m |
| DGNSS-Positionsgenauigkeit | Horizontal: 0,4 m + 1 ppm; Vertikal: 0,8 m + 1 ppm |
| RTK-Positionsgenauigkeit | Horizontal: ±8 mm + 1 ppm; Vertikal: ±15 mm + 1 ppm |
| Funkprotokolle | Satel 3AS, CHC, TT450, Transparent |
| Kursgenauigkeit | 0,1 ⁰ @1 m baseline |
| Trägheitsnavigationsstabilität | 6 ⁰/ h (Genauigkeitsabfall 1 m nach 20 s) |
| IMU-Aktualisierungsrate | 200 Hz |
Hinweis zur Navigation & Präzision: Während beide GNSS RTK nutzen, bietet der Pro-Version eine fortschrittlichere INS (Inertial Navigation System)-Integration. Dies sorgt für stabilere Positionierung, insbesondere unter Brücken oder in Bereichen mit Hindernissen (Schatten).
D230 & D270 Single beam Echo Sounder
| Merkmale | |
|---|---|
| Datentyp | CHCGD, NMEA SDDPT/SDDBT, Originalwellenform |
| Tonbereich | 0,1 m bis 200 m |
| Ton-Genauigkeit | ±0,01 m + 0,1 % x D (D ist die Wassertiefe) |
| Auflösung | 0,01 m |
| Maximale Abtastrate | 30 Hz |
| Frequenz | 200 kHz |
| Abstrahlwinkel | 6,2° ± 1° |
| Einstellbereich für Schallgeschwindigkeit | 1400 – 1700 m/s |
| Integrierter Wassertemperatursensor | -55 °C bis +100 °C, Echtzeitkorrektur der Schallgeschwindigkeit |
Unterschied zwischen dem D230 und dem D270 Echo Sounder
Das APACHE 3 ist mit dem D230 Single beam Echo Sounder ausgestattet, während das APACHE 3 Pro mit dem verbesserten D270 ausgestattet ist.
Der D230 ist ein bewährtes, zuverlässiges Einstiegs-Echolot für klassische bathymetrische Anwendungen.
Der D270 ist die weiterentwickelte Version mit:
- integrierter Umweltkompensation (Temperatur)
- moderner Systemarchitektur
- höherer Effizienz im Workflow
Als Anwender besser beraten
Sie haben Interesse an unserem Angebot oder möchten gern noch mehr über das APACHE 3 Sonar-Boot von CHCNAV erfahren? Dann rufen Sie uns noch heute an und vereinbaren Sie einen kostenlosen und für Sie unverbindlichen Beratungstermin. Wir werden all Ihre Fragen beantworten. Als Händler und gleichzeitig Anwender sind wir bestens aufgestellt, um Ihnen auch nach dem Kauf zur Seite zu stehen.