CHCNAV RS7 Scanner
TitleCHCNAV RS7 Scanner - Leistungsstarker Handheld-LiDAR-SLAM-Scanner
Der CHCNAV RS7 ist ein moderner Handheld-LiDAR-SLAM-Scanner für die schnelle, präzise und wirtschaftliche Erfassung von Gebäuden und Innenräumen. Er vereint leistungsstarke Sensortechnologie mit einem durchgängigen Device-to-Cloud-Workflow und richtet sich an Anwender, die Wert auf Effizienz, Zuverlässigkeit und hochwertige 3D-Ergebnisse legen.

TitleLeistungsstarkes System
Der RS7 wurde für den praxisnahen Einsatz entwickelt. Sein robustes, qualitativ hochwertiges Design macht ihn zur idealen Lösung für Bauprojekte, Bestandsaufnahmen und technische Dokumentationen.
Die hohe Erfassungsgeschwindigkeit ermöglicht es, auch größere Innenbereiche in kurzer Zeit vollständig zu digitalisieren – ohne aufwendige Vorbereitung oder komplexe Einrichtung.

TitleZuverlässige Ergebnisse in anspruchsvollen Umgebungen

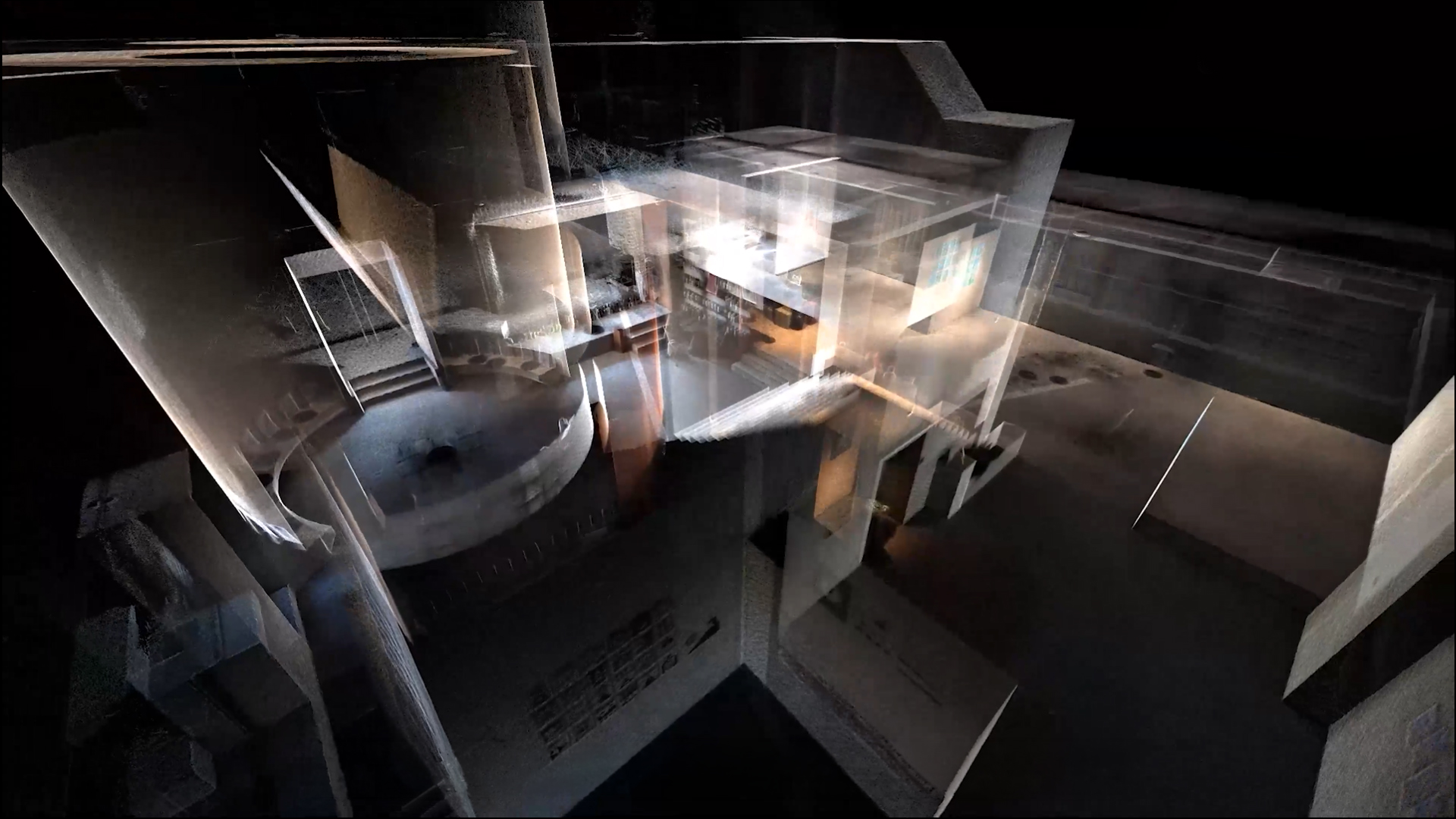
Innenräume stellen besondere Anforderungen an mobile 3D-Scanner: lange Flure, wiederkehrende Strukturen oder mehrstöckige Bereiche können herkömmliche Systeme schnell an ihre Grenzen bringen. Der CHCNAV RS7 Scanner wurde genau für solche Szenarien konzipiert und liefert stabile, vollständige Punktwolken – selbst bei schwierigen geometrischen Bedingungen.
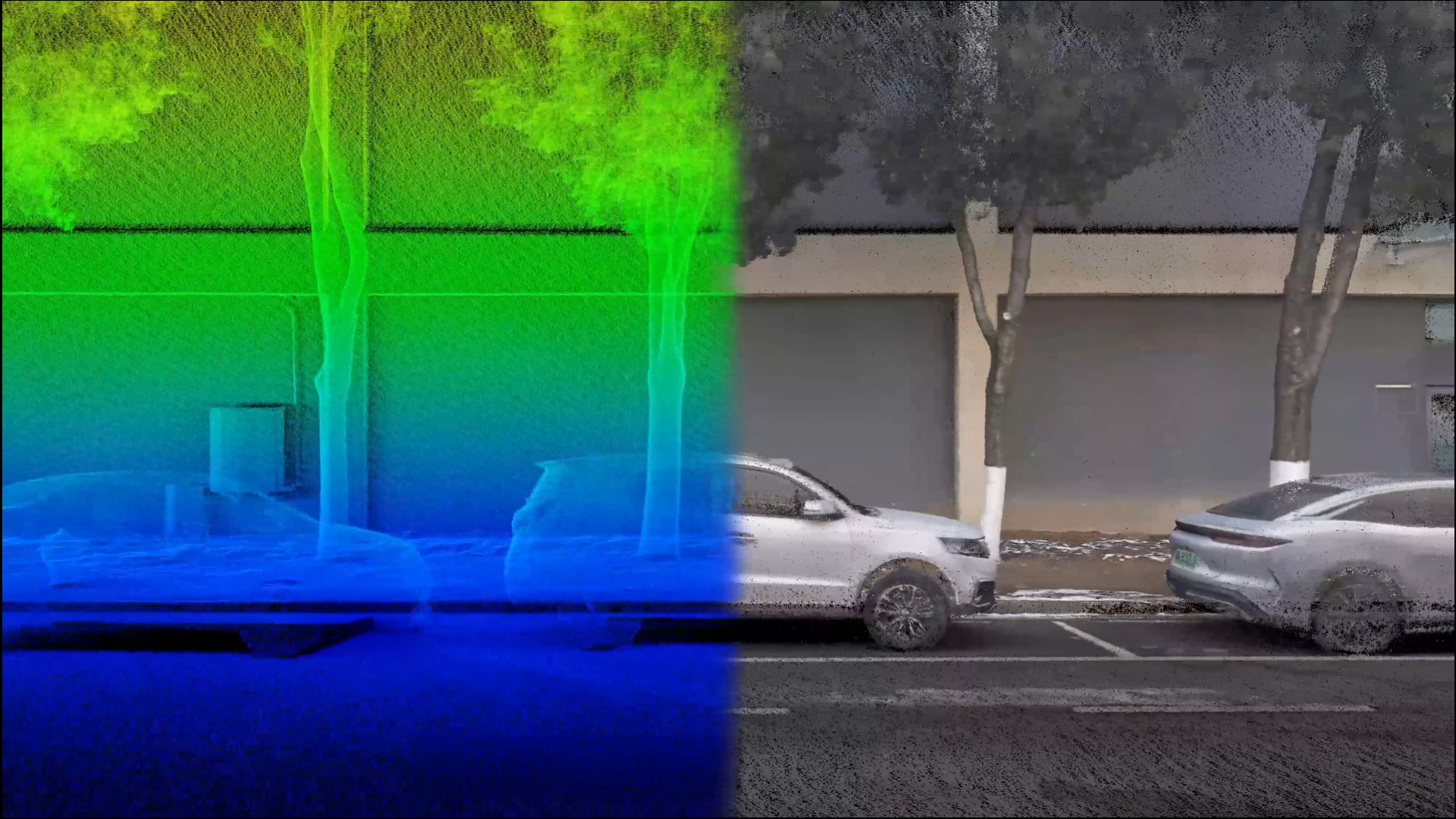
TitleHochwertige 3D-Daten mit realistischer Darstellung
Neben der präzisen geometrischen Erfassung ermöglicht das System auch eine detailreiche visuelle Dokumentation. So entstehen nicht nur exakte Punktwolken, sondern auch realitätsnahe 3D-Modelle in Echtfarbe. Dies erleichtert die Analyse, Präsentation und Weiterverarbeitung der Daten erheblich.

TitleDurchgängiger Workflow vom Scan bis zum fertigen Modell

Der RS7 Scanner ist auf Effizienz ausgelegt: Erfassung, Datenübertragung und Verarbeitung greifen nahtlos ineinander. Feldaufnahmen lassen sich direkt in die Cloud übertragen und automatisiert weiterverarbeiten. Das reduziert manuelle Zwischenschritte und beschleunigt Projektabläufe deutlich.
TitleZukunftssicher und flexibel integrierbar
Dank seines offenen Systemansatzes lässt sich der RS7 Scanner von CHCNAV problemlos in bestehende Software- und Projektumgebungen integrieren. Damit eignet sich das System sowohl für etablierte Workflows als auch für wachsende Anforderungen im Bereich der digitalen Bestandsaufnahme und 3D-Dokumentation. Der RS7 lässt sich auch bequem mit anderer Hardware kombinieren und sorgt somit für speziellere und auch flexiblere Arbeitsabläufe.


TitleVielseitige 3D-Erfassung für Planung, Dokumentation und Analyse
Der CHCNAV RS7 Scanner wurde für professionelle Anwendungen entwickelt, bei denen präzise, vollständige und realitätsnahe 3D-Daten entscheidend sind. Dank seiner mobilen Bauweise, der schnellen Datenerfassung und der stabilen Positionsbestimmung eignet sich das System sowohl für strukturierte Innenräume als auch für komplexe Gebäudestrukturen.
Ob Bestandsaufnahme, digitale Dokumentation oder visuelle Rekonstruktion – der RS7 ermöglicht eine effiziente Erfassung unterschiedlichster Umgebungen und schafft eine zuverlässige Datengrundlage für Planung, Analyse und Präsentation. Durch die Kombination aus geometrischer Präzision und farbgetreuer Darstellung lassen sich Projekte unterschiedlichster Branchen wirtschaftlich und zeitsparend realisieren.
TitleAnwendungsbereiche
Der Scanner kommt insbesondere in folgenden Bereichen zum Einsatz:
- Architektonische Vermessung
- Innenarchitektur & Renovierung
- Bauwesen
- Digitaler Zwilling
- Öffentliche Sicherheit & forensische Untersuchungen
- Kultur & Tourismus
- Denkmalpflege


TitleWie der CHCNAV RS7 präzise 3D-Daten erzeugt
Der CHCNAV RS7 kombiniert LiDAR-Technologie, inertiale Messtechnik und intelligente SLAM-Algorithmen zu einem hochintegrierten mobilen Erfassungssystem.
Durch die kontinuierliche Fusion aller Sensordaten entsteht während der Bewegung eine stabile und konsistente 3D-Punktwolke – ohne externe Referenzsysteme oder aufwendige Zielmarken.
TitleDeep INS + SLAM Fusion für zuverlässige Kartierung
Kern des Systems ist die enge Verzahnung von Inertial Navigation System (INS) und SLAM-Algorithmik. Die integrierte Hochleistungs-IMU mit einer Bias-Instabilität von unter 0,5°/h erfasst selbst kleinste Bewegungsänderungen und stabilisiert die Trajektorie in Echtzeit. Dadurch bleibt die Positionsbestimmung auch in strukturarmen Umgebungen wie langen Fluren oder Treppenhäusern zuverlässig und driftarm.

TitleHochdichte LiDAR-Erfassung mit erweitertem Sichtfeld

Der integrierte LiDAR-Sensor der neuesten Generation arbeitet mit einer Erfassungsrate von bis zu 1,15 Millionen Punkten pro Sekunde. In Kombination mit einem ultraweiten Sichtfeld von 360° × 189° werden Räume vollständig – inklusive Decken- und Randbereiche – erfasst. Die hohe Punktdichte ermöglicht eine präzise Abbildung feiner Geometrien und Oberflächendetails.
TitleFarb- & Bildintegration für realitätsnahe Modelle
Zwei integrierte 12-MP-HD-Kameras unterstützen die geometrische Erfassung durch hochauflösende Bilddaten. Dank moderner Binning-Technologie liefern sie auch bei schwierigen Lichtverhältnissen klare Ergebnisse.
Die Sensordaten werden synchronisiert verarbeitet, sodass farbige Punktwolken und visuell realistische 3D-Modelle entstehen.
TitleAutomatisierte Verarbeitung & 3D-Rekonstruktion
Nach der Datenerfassung werden die Informationen über den integrierten Device-to-Cloud-Workflow weiterverarbeitet. Die System-Engine erzeugt aus den Rohdaten präzise Punktwolken, Mesh-Modelle sowie moderne 3D-Gaussian-Splatting-Darstellungen.
Die Verarbeitung erfolgt weitgehend automatisiert, wodurch reproduzierbare und qualitativ hochwertige Ergebnisse sichergestellt werden.

TitleCHCNAV RS7 - Technische Details auf einen Blick
Der CHCNAV RS7 vereint leistungsstarke Sensorik, präzise Inertialtechnik und moderne Datenverarbeitung in einem kompakten Handheld-System.
In den folgenden Tabellen sind alle technischen Kennwerte zu LiDAR-Leistung, Kamerasystem, Genauigkeit, Datenschnittstellen, Systemarchitektur und Betriebsparametern übersichtlich zusammengefasst.
TitleSpezifikationen
| Allgemeine Systemleistung | |
|---|---|
| Absolute Genauigkeit | H: < 3 cm RMS V: < 3 cm RMS |
| Relative Genauigkeit | 1 cm |
| Reproduzierbarkeit | 2 cm |
| Stromversorgung | Im Griff integrierte Batterie |
| Kapazität der Batterie | 47,5 Wh |
| Arbeitszeit von einer Batterie | 150 min |
| Stromverbrauch | 16 W |
| Datenspeicherung | 512 GB |
| Gewicht (mit Batteriegriff) | 1200 g |
| Betriebstemperatur | -20°C bis +50°C |
| Schutzklasse | IP64 (gemäß IEC 60529) |
| Laserscanner | |
|---|---|
| Laser-Produktklassifizierung | Klasse 1 (augensicher) |
| Reichweite | 40 m bei 10% Reflexionsgrad |
| Kanäle | 64 |
| Max. effektive Messrate | Einzelne Rückkehr: 576 000 Punkte/s Doppelte Rückkehr: 1152 000 Punkte/s |
| Sichtfeld | 360° × 189° |
| Wellenlänge | 905 nm |
| Kamera | |
|---|---|
| Anzahl Kameras | 2 x 12 MP |
| Sensorgröße | 1/2 Zoll |
| Sichtfeld (FOV) | 340°(H) × 360°(V) |
| Positions- & Orientierungssystem | |
|---|---|
| GNSS-System | GPS: L1/L2/L5 GLONASS: L1, L2 BEIDOU B1,B2,B3 GALILEO E1/E5a/E5b |
| IMU-Aktualisierungsrate | 500 Hz |
| Instabilität der Nullpunktverschiebung des Kreisels | 0,5°/h |
| Gyro-Zufallsbewegung | 0,01°/√h |
| Genauigkeit der Nullpunktabweichung-Instabilität | 10 ug |
| Genauigkeit der Zufallsbewegung | 0,017 m/s/√h |
| Kommunikationsschnittstellen | |
|---|---|
| WLAN | 2,4GHz & 5GHz IEEE 802.11n/ac (U-NII-1/3) |
| Bluetooth | V5.3 (BR+EDR+BLE) |
| Anschlüsse | 1 x USB V3.0 Typ-C-Anschluss (Daten-Download) 1/4"-Befestigungsgewinde |
| Software | |
|---|---|
| SmartGo-Software | Datenerfassungssteuerung, Echtzeitpunkt Punktwolkenanzeige, etc. |
| CoPre intelligent LiDAR Erarbeitungssoftware | POS-Verarbeitung, Anpassung und Verfeinerung, Punktwolkenerzeugung, 3D-Modellierung Unterstützt eingefärbte Punktwolken, 3D-Mesh-Modelle und 3D-Gaussian-Splatting (3DGS)-Ausgaben. |
| CoProcess | Punktwolkenverarbeitung mit integrierten CAD-Werkzeugen |
Als Anwender besser beraten
Wenn Sie sich für unser Angebot interessieren oder mehr über den CHCNAV RS7-Scanner erfahren möchten, dann rufen Sie uns noch heute an und vereinbaren einen kostenlosen und unverbindlichen Beratungstermin für Sie. Wir werden alle Ihre Fragen beantworten. Als XGRIDS Gold-Händler und gleichzeitig Anwender sind wir gut aufgestellt, um Sie auch nach dem Kauf zu unterstützen.