Was ist SLAM?

TitleSimultaneous Localization and Mapping
SLAM steht für „Simultaneous Localization and Mapping“, zu Deutsch „Simultane Lokalisierung und Kartierung“, und beschreibt die Fähigkeit eines Systems, sich in einer unbekannten Umgebung zu orientieren und diese gleichzeitig zu kartieren. Ursprünglich aus der Roboterindustrie der 1980er und 1990er Jahre stammend, entwickelte sich SLAM schnell zu einer Schlüsseltechnologie, die heute in vielen Bereichen wie der Robotik, der Vermessung, und der autonomen Navigation Anwendung findet.
TitleDie Entstehung von SLAM
Das Hauptproblem der frühen Robotik bestand darin, autonome Fahrzeuge durch komplexe Umgebungen wie Fabrikhallen navigieren zu lassen, ohne dabei auf externe Hilfsmittel wie GPS zurückzugreifen. SLAM wurde als Lösung entwickelt, um es Robotern zu ermöglichen, ihre Position in einem Raum zu bestimmen und gleichzeitig diesen Raum kartografisch zu erfassen.
- Ursprung in den 1980er Jahren – SLAM wurde in der Robotik entwickelt, um Robotern das gleichzeitige Kartieren einer unbekannten Umgebung und die Bestimmung ihrer Position darin zu ermöglichen.
- Frühe Arbeiten – Forscher wie Hugh Durrant-Whyte und John J. Leonard leisteten Pionierarbeit in der Entwicklung von SLAM-Algorithmen.
- Ziel – SLAM löst das Problem der Unsicherheit, indem es mithilfe von Sensoren (z. B. Kameras, LiDAR) die Umgebung abbildet und die Position eines Objekts gleichzeitig lokalisiert.
- Fortschritte durch Rechenleistung und Sensorik – Mit der Verbesserung von Sensoren und der gesteigerten Rechenleistung in den 2000er Jahren wurde SLAM immer präziser und alltagstauglicher, z. B. in Drohnen, Robotern und autonomen Fahrzeugen.
TitleFunktionsweise von SLAM
SLAM-Systeme nutzen verschiedene Sensordaten, um die Umgebung zu erfassen und die eigene Position innerhalb dieser Umgebung zu bestimmen. Diese Sensoren können visuelle Daten (z. B. Kamerabilder), LiDAR (Light Detection and Ranging), Radar oder Sonar umfassen, kombiniert mit inertialen Messeinheiten (IMUs) zur genauen Positionsbestimmung. SLAM ist ein iterativer Prozess: Je mehr Daten ein Gerät über die Umgebung sammelt und sich in dieser bewegt, desto präziser wird seine Schätzung der eigenen Position und der Umgebungskarte.
TitleVisual SLAM und LiDAR SLAM
Visual SLAM (vSLAM)
Visual SLAM verwendet hauptsächlich visuelle Informationen, also Kameradaten, zur simultanen Lokalisierung und Kartierung. Kameras erfassen visuelle Merkmale der Umgebung, und der Algorithmus berechnet daraus die Position des Geräts. Diese Methode ist besonders vorteilhaft, da Kameras kostengünstig und weit verbreitet sind. Visual SLAM wird häufig in Drohnen, Augmented-Reality-Geräten und autonomen Fahrzeugen verwendet. Der Nachteil ist jedoch, dass vSLAM in schlecht beleuchteten Umgebungen oder bei eintönigen visuellen Szenen (ohne klare Merkmale) weniger genau ist.
LiDAR SLAM
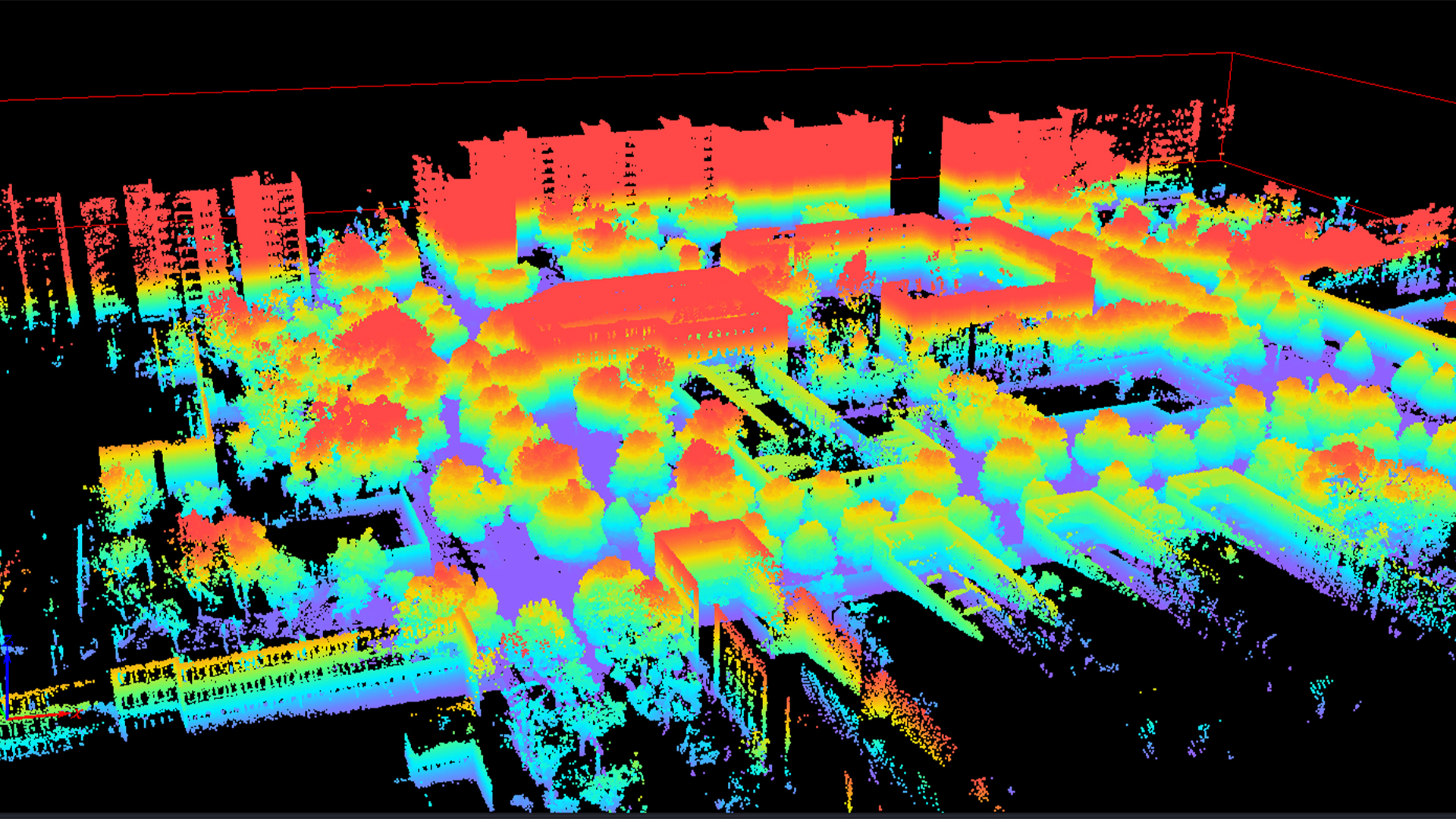
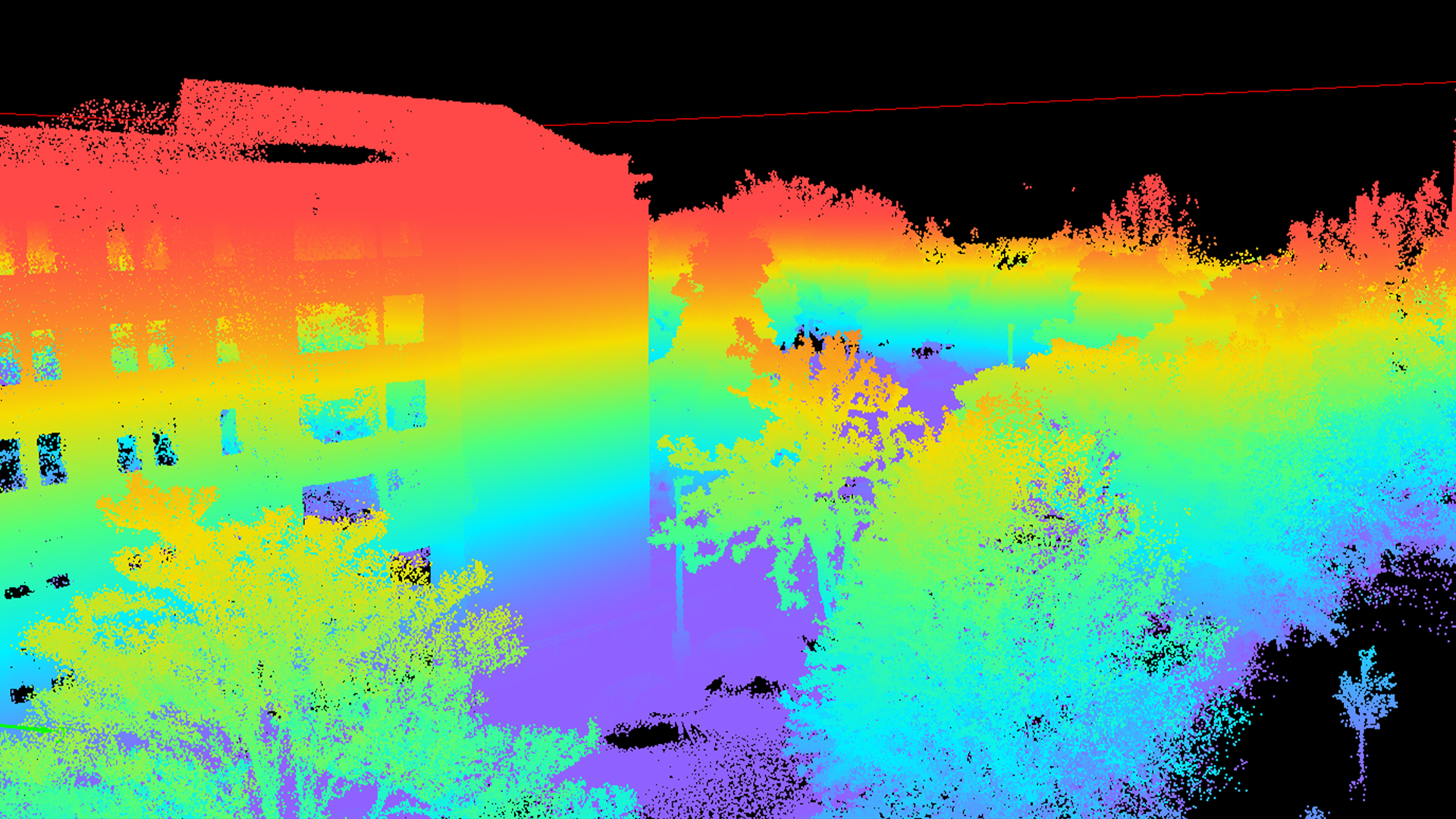
LiDAR SLAM nutzt hingegen LiDAR-Sensoren, um die Umgebung zu scannen. Diese Sensoren senden Laserimpulse aus und messen die Zeit, die benötigt wird, bis diese Impulse zurückkehren. Dadurch kann die Entfernung zu Objekten in der Umgebung sehr genau bestimmt werden. LiDAR SLAM ist besonders in Umgebungen nützlich, in denen visuelle Informationen nicht ausreichen, wie z. B. bei schlechten Lichtverhältnissen oder in strukturell eintönigen Gebieten. Diese Technologie findet Anwendung in der Vermessung, autonomen Fahrzeugen und der 3D-Kartierung.
TitleVerschiedene SLAM-Algorithmen
SLAM gibt es in verschiedenen Ausprägungen, die sich durch den Einsatz von unterschiedlichen Sensoren und Technologien auszeichnen:
- 2D SLAM: Dieser Algorithmus kartiert nur in zwei Dimensionen und wird oft in einfachen Indoor-Umgebungen eingesetzt. Dies wird oft in Robotik eingesetzt.
- 3D SLAM: Dieser Algorithmus ist weitaus komplexer und ermöglicht eine dreidimensionale Kartierung der Umgebung. Besonders wichtig bei der Vermessung und Kartierung größerer Flächen oder unstrukturierter Gebiete.
- Visual SLAM (vSLAM): Wie oben beschrieben, nutzt Visual SLAM Kameradaten zur Kartierung und Lokalisierung.
- LiDAR SLAM: Setzt auf präzise Laserentfernungsmessungen, um die Umgebung in 3D zu erfassen.
- Hybrider SLAM: Dies ist eine Kombination von LIDAR SLAM 3D oder 2D und dem visual SLAM (vSLAM). Dieses Verfahren nutzt den Vorteil beider Verfahren. Daher wird der SLAM sehr stabil und wohl die robuste Methode. Der Hybride SLAM ist aber technisch sehr komplex aufgrund der unterschiedlichen Genauigkeiten und die Integration damit aufwendiger. Daher wird es noch sehr wenig eingesetzt.
TitleVerschiedene mobile Laserscanner (SLAM-Scanner)
Image  | Image  | Image  | Image  | Image  |
XGRIDS Lixel Kity K1 Der XGRIDS Lixel Kity K1 ist ein kompakter, handgeführter LiDAR-SLAM-Scanner für schnelle und flexible 3D-Datenerfassung. Er erzeugt farbige Punktwolken in Echtzeit und eignet sich besonders für effiziente Bestandsaufnahmen im Innen- und Außenbereich. | XGRIDS Lixel L2 Pro Der XGRIDS Lixel L2 Pro ist ein mobiler Hochleistungs-LiDAR-Scanner für präzise 3D-Erfassungen auch in größeren Umgebungen. Er kombiniert hohe Reichweite mit dichter Punktwolkenqualität und ermöglicht eine zügige Datenerfassung im Feld. | CHCNAV RS10 & RS30 Die CHCNAV RS10 und RS30 sind tragbare SLAM-Scanner mit integriertem GNSS-RTK zur direkten Georeferenzierung der Daten. Sie ermöglichen eine schnelle 3D-Erfassung im Innen- und Außenbereich und liefern unmittelbar nutzbare Punktwolken. | FARO Orbis & Orbis Premium Die FARO Orbis Serie ist ein mobiler Laserscanner für die effiziente Erfassung komplexer Innen- und Außenbereiche. Sie erfasst hochauflösende 3D-Daten während der Bewegung und unterstützt professionelle Workflows in Vermessung und Bauwesen. | FARO Blink Der FARO Blink ist ein benutzerfreundlicher Imaging-Laser-Scanner für eine besonders einfache 3D-Datenerfassung. Mit automatisierten Aufnahmeprozessen erstellt er farbige Punktwolken und 360°-Aufnahmen auf Knopfdruck. |
TitleSLAM in der Vermessung
SLAM-Algorithmen werden nicht nur in der Robotik eingesetzt, sondern auch zunehmend in der Vermessung. Hierbei geht es um die präzise Kartierung von Innen- und Außenbereichen, wobei die Genauigkeit von SLAM eine entscheidende Rolle spielt. Während in der Robotik Toleranzen von mehreren Zentimetern akzeptabel sind, ist in der Vermessung höchste Präzision gefordert.
Moderne SLAM-Algorithmen, wie der von CSIRO entwickelte, bieten auch in schwierigen Umgebungen, wie sich wiederholenden Korridoren oder Räumen mit sich bewegenden Personen, robuste und verlässliche Ergebnisse.

Merkmale von SLAM
- Mobilität: SLAM-Systeme können sich frei durch die Umgebung bewegen und gleichzeitig kartieren, was besonders in schwer zugänglichen oder weitläufigen Gebieten nützlich ist.
- Schnelligkeit: SLAM erfasst Daten kontinuierlich und arbeitet deutlich schneller als statische Vermessungssysteme, was Zeit und Kosten spart.
- Flexibilität: SLAM kann sowohl in Innenräumen als auch im Freien eingesetzt werden und liefert zuverlässige Ergebnisse in unterschiedlichen Umgebungen.
- Autonomie: SLAM navigiert in Echtzeit ohne GPS und eignet sich ideal für Innenräume, urbane Gebiete oder unterirdische Umgebungen, was die Effizienz und Sicherheit autonomer Geräte steigert.
TitleFazit
SLAM ist eine Schlüsseltechnologie, die es mobilen Systemen ermöglicht, sich in unbekannten Umgebungen zu orientieren und diese gleichzeitig zu kartieren.
Mit den Fortschritten in Visual SLAM und LiDAR SLAM bieten sich immer neue Anwendungsmöglichkeiten, von der Robotik bis hin zur hochpräzisen Vermessung.
Dennoch müssen die Vor- und Nachteile der verschiedenen SLAM-Methoden genau abgewogen werden, um die beste Lösung für die jeweilige Anwendung zu finden.
