Wie scannt man einen Wald mit dem XGRIDS Lixel L2 Pro Scanner?

Title29 Hektar Wald effizient vermessen
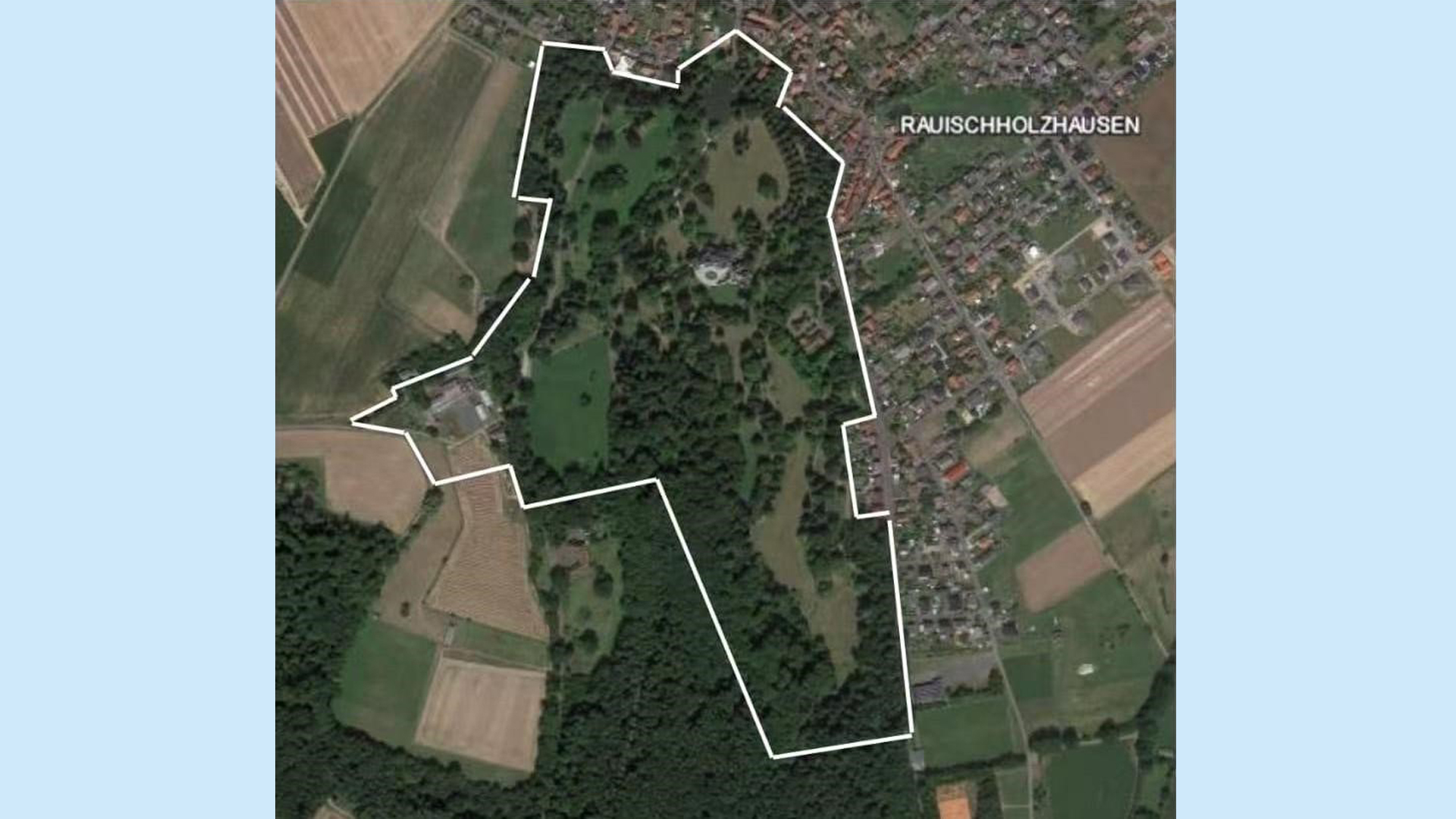
Phillip Bosch von „Bosch Previews” wurde mit der Vermessung eines 29 Hektar großen Geländes (ein Park in Rauischholzhausen) mit dem mobilen Laserscanner „L2 Pro” von XGRIDS beauftragt. Besonders die Flächen unter Bäumen sollten vollständig erfasst werden. Die Punktwolke sollte dabei georeferenziert sein.
Die effizienteste Lösung wäre eine Kombination aus Drohnen für die großflächige Abdeckung und handgeführten Laserscannern für die Bereiche unter den Bäumen gewesen. In diesem Fall jedoch kam ausschließlich ein mobiler Laserscanner zum Einsatz.
TitleHerausforderungen beim Scannen im Wald
- Das Gelände ist sehr weitläufig. Es musste in mehrere Abschnitte unterteilt und später zusammengeführt werden.
- Wälder bieten nur wenige visuelle Merkmale – lange Scans erhöhen das Risiko von SLAM-Drift.
- Viele Bereiche sind von Büschen oder Bäumen bedeckt, was zu Signalabschattungen beim RTK führen kann.
- Das Ziel war es, den gesamten Park so vollständig wie möglich zu scannen – allerdings zeigt XGRIDS derzeit nicht an, welche Flächen bereits gescannt wurden.
TitleEingesetzte Ausrüstung
- Scanner: L2Pro mit 16 Kanälen + Standard-RTK
- RTK-System: Emlid RTK Rover zur Koordinatenbestimmung der GCPs (Ground Control Points)
- Zwei Smartphones: eines für die Navigation, eines zur Scannersteuerung
- Drei Akkus: für ganztägige Einsätze
- Zusatzausrüstung: wasserdichte Stiefel, langärmlige Kleidung, lange Hosen
Hinweis
Idealerweise wäre die Verwendung eines RTK-Systems in Vermessungsqualität sinnvoll gewesen, da dieses stabilere Signale liefert. Auch ein Tragesystem hätte den Scanvorgang deutlich komfortabler gemacht.

TitleVorgehensweise beim Scannen eines Waldes - Planung ist alles

Die richtige Planung war entscheidend für den Erfolg. Der L2Pro-RTK liefert nur dann zuverlässige Positionsdaten, wenn die Verbindung nicht länger als 100 m ohne Fix ist (beim Lixel K1 sogar nur 50 m). Aufgrund der dichten Vegetation war dies im Park nicht realisierbar. Deshalb plante das Vermesserteam, die Koordinaten nachträglich über Bodenkontrollpunkte in die Punktwolke einzurechnen.
Das Team legte 13 Bodenkontrollpunkte gleichmäßig im Gelände an. Jeder Kontrollpunkt wurde mit einer Nummer am Boden markiert und mit einem reflektierenden Aufkleber versehen. So ließen sich diese eindeutig zuordnen und später in der Software identifizieren. Sollte die automatische Referenzierung nicht funktionieren, können die Kontrollpunkte manuell in CloudCompare zugewiesen werden.
Da XGRIDS derzeit keine integrierte Routenplanung bietet, nutzte das Team Google Maps auf dem Laptop, um das Gelände in fünf Scanbereiche aufzuteilen. Die geplanten Scanpfade wurden anschließend über das Smartphone abgerufen.
Wie dicht müssen die Routen sein? Das hängt von der gewünschten Punktwolkendichte ab. Für #-förmige Scanmuster empfiehlt XGRIDS einen Abstand von etwa 120 m.
TitleDer Scanprozess
Das Team begann im Norden des Parks. Dank aktivem RTK blieb das SLAM sehr stabil – selbst bei einstündigen Scans in dichter Vegetation. Wenn das Team längere Zeit unter dichten Baumkronen ohne RTK-Fix unterwegs waren (z. B. mehr als 10 Minuten), bewegte sich das Team anschließend in offene Bereiche, um den RTK-Fix wiederherzustellen.
Aufgrund der langen Scanzeiten und steigender Punktdichte am Smartphone entschied sich das Team für den Kabelmodus. Dieser erwies sich als deutlich stabiler als die drahtlose Verbindung – es gab keine Verbindungsprobleme.

Standortanzeige mit Verzögerung
Ein Kritikpunkt: Das blaue Dreieck, das in der App Lixel Go die aktuelle Position anzeigt, reagierte teilweise mit bis zu 10 Sekunden Verzögerung. Dem Team war nicht klar, ob es sich um reine Latenz oder um SLAM-Drift handelte – Letzteres hätte den Abbruch des Scans notwendig gemacht. Hier besteht Verbesserungsbedarf bei der Software.
Tipp: Am Anfang und Ende eines Scans sollte der Scanner möglichst in dieselbe Richtung zeigen – das erleichtert die spätere Fusion der einzelnen Abschnitte. Ein vollständiger Start-zu-Ende-Loop ist ausreichend. Kleine Schleifen sind bei Verwendung von RTK nicht notwendig.
Gesamtdauer der Scans: über 4 Stunden.
TitleDatenverarbeitung & Auswertung
Die gesammelten Daten beliefen sich auf über 500 GB. Die Verarbeitung dauerte rund 22 Stunden – ein leistungsstarker Rechner ist also essenziell.
Trotz der großen Datenmenge war die Verarbeitung erfolgreich – ohne den stabilen Modus. Die resultierende Punktwolke war gut zusammengefügt und zeigte keine merklichen Verschiebungen.
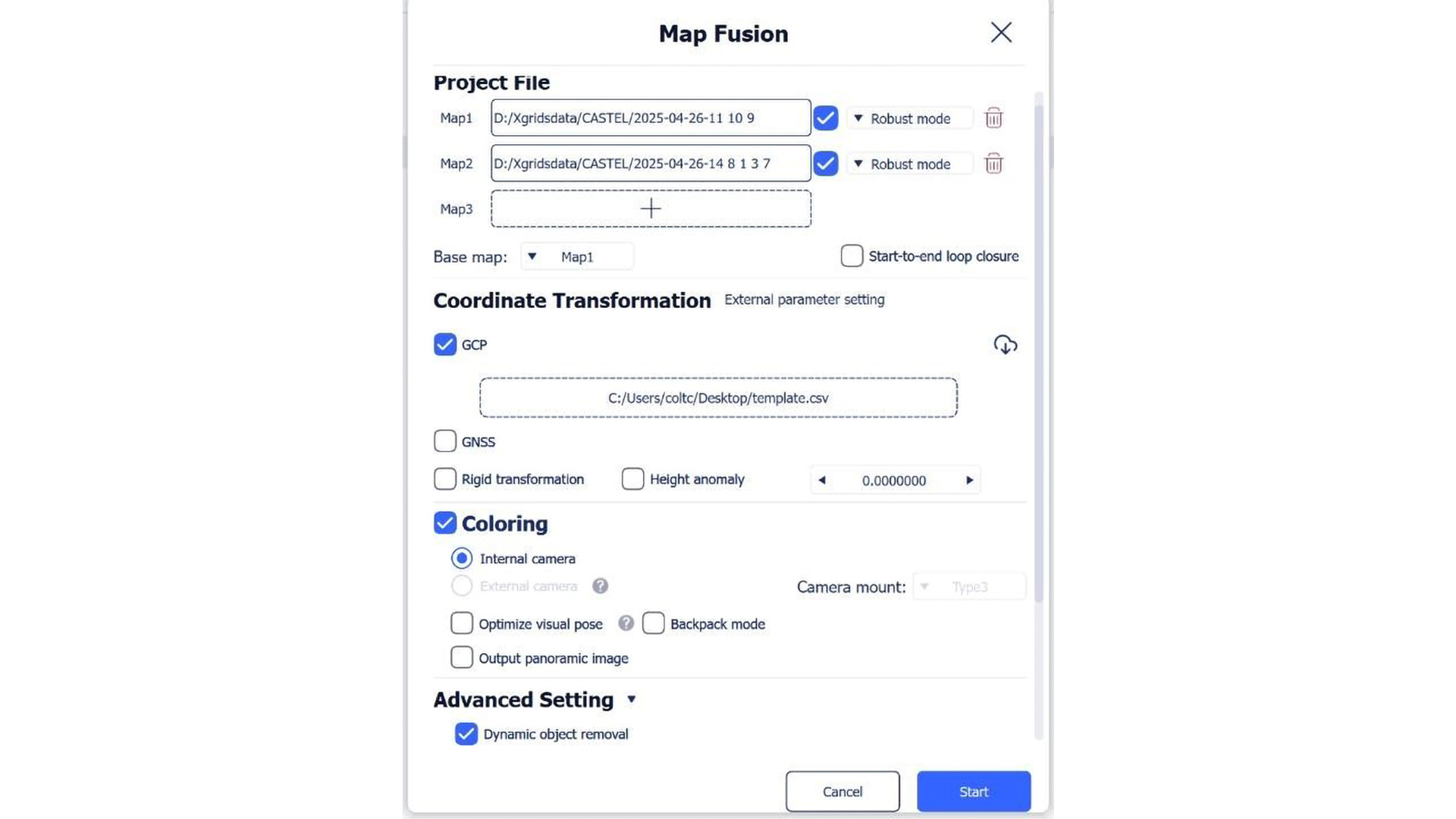
Für die Georeferenzierung sollte unbedingt die Bodenkontrollpunkt-Vorlage aus der XGRIDS-Software verwendet werden – diese ist per Download-Button leicht abrufbar.
TitleFazit: SLAM überzeugt – mit RTK noch besser
Das Team ist mittlerweile überzeugt von der SLAM-Technologie von XGRIDS. Beim ersten Versuch hatte es auf RTK verzichtet – aus Sorge, das Signal würde unter den Bäumen nicht durchkommen. Beim zweiten Scan stellte es jedoch fest, dass selbst unter lichteren Baumkronen oftmals ein stabiler RTK-Fix möglich ist.
Empfehlung des Teams: Verwendet ein RTK-System in Vermessungsqualität – damit lassen sich auch lange Scans ohne Drift durchführen.
Tipp zum Schluss: Wenn SLAM-Drift auftritt, den Scan sofort stoppen. Solange der Drift nur kurz andauert, lässt er sich meist ohne großen Aufwand korrigieren.
Hinweis: Dieser Bericht wurde aus dem Englischen übersetzt. Der Original-Beitrag stammt von XGRIDS.