How do you scan a forest with the XGRIDS Lixel L2 Pro scanner?

TitleEfficiently survey 29 hectares of forest
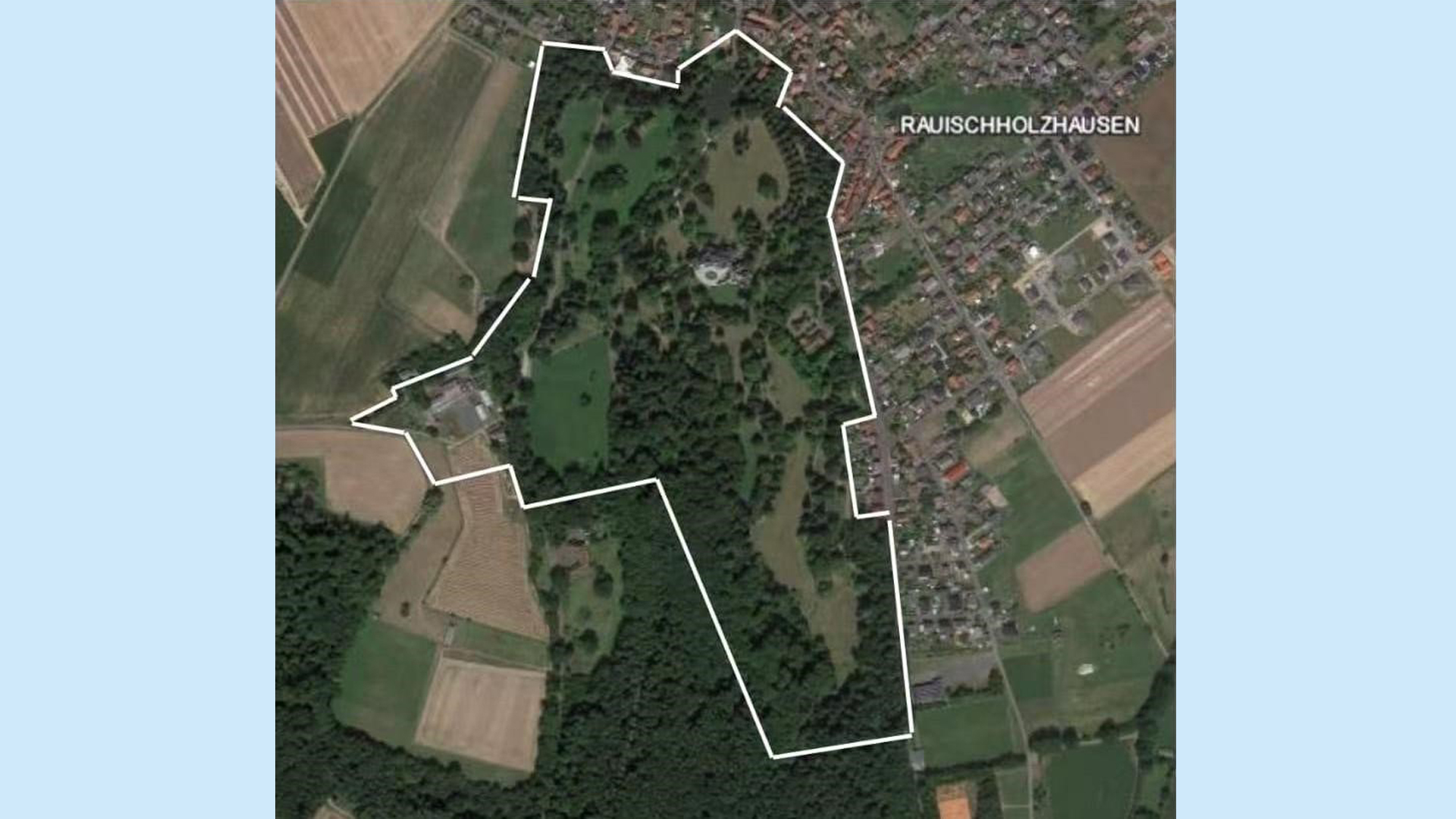
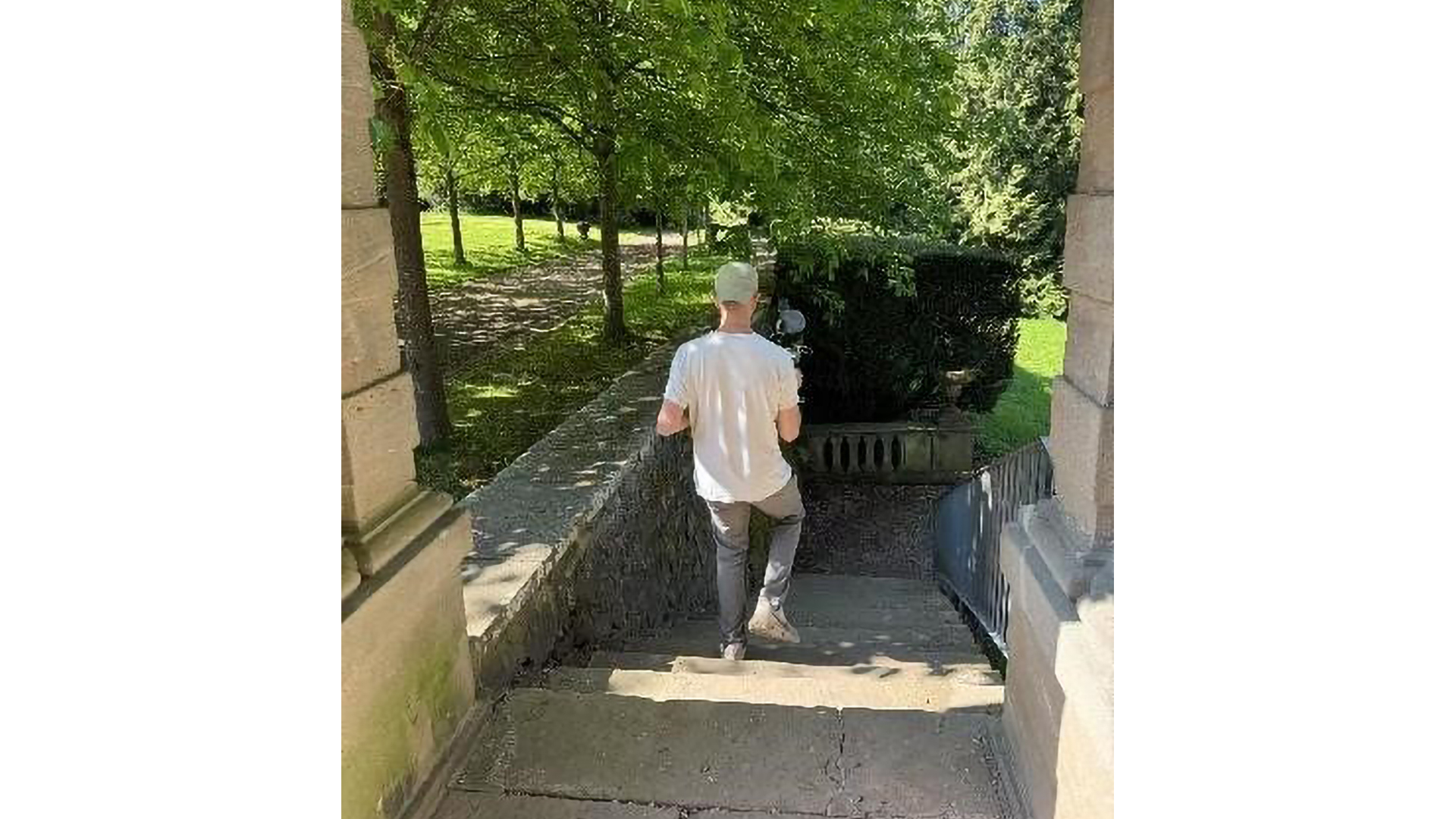
Phillip Bosch from “Bosch Previews” was commissioned to survey a 29-hectare site (a park in Rauischholzhausen) with the mobile laser scanner “L2 Pro” from XGRIDS. In particular, the areas under trees were to be fully surveyed. The point cloud needed to be georeferenced.
The most efficient solution would have been a combination of drones for large-scale coverage and handheld laser scanners for the areas under the trees. In this case, however, only a mobile laser scanner was used.
TitleThe challenges of scanning in the forest
- The site is very extensive. It had to be divided into several sections and later merged.
- Forests offer few visual features – long scans increase the risk of SLAM drift.
- Many areas are covered by bushes or trees, which can lead to signal shadowing in the RTK.
- The goal was to scan the entire park as completely as possible – however, XGRIDS does not currently show which areas have already been scanned.
TitleEquipment used for this job
- Scanner: L2Pro with 16 channels + standard RTK
- RTK system: Emlid RTK rover for determining the coordinates of the GCPs (Ground Control Points)
- Two smartphones: one for navigation, one for scanner control
- Three batteries: for all-day missions
- Additional equipment: waterproof boots, long-sleeved clothing, long trousers
Note
Ideally, the use of a survey-grade RTK system would have made sense, as this provides more stable signals. A carrying system would also have made the scanning process much more comfortable - our arms were correspondingly exhausted.

TitleProcedure for scanning a forest - Planning is everything

Correct planning was crucial for success. The L2 Pro RTK only provides reliable position data if the connection is no longer than 100 metres without a fix (with the Lixel K1 even only 50 metres). Due to the dense vegetation, this was not feasible in the park. The surveying team therefore planned to add the coordinates to the point cloud retrospectively using GCPs.
The team laid out 13 GCPs evenly across the terrain. Each GCP was marked with a number on the ground and labelled with a reflective sticker. This allowed the team to clearly assign them and identify them later in the software. If the automatic referencing does not work, the GCPs can be assigned manually in CloudCompare.
As XGRIDS does not currently offer integrated route planning, the team used Google Maps on the laptop to divide the site into five scan areas. It was then able to call up the planned scan paths via smartphone.
How dense do the routes need to be? That depends on the desired point cloud density. For #-shaped scan patterns, XGRIDS recommend a distance of around 120 metres.
TitleThe scanning process
The team started in the north of the park. Thanks to active RTK, the SLAM remained very stable – even during hour-long scans in dense vegetation. If the team was travelling under dense tree canopy for a long time without an RTK fix (e.g. more than 10 minutes), the team then moved into open areas to re-establish an RTK fix.
Due to the long scanning times and increasing point density on the smartphone, the team opted for cable mode. This proved to be much more stable than the wireless connection – there were no connection problems.

Location display with a delay
One point of criticism: The blue triangle that shows the current position in the Lixel Go app sometimes reacted with a delay of up to 10 seconds. It was not clear whether this was pure latency or SLAM drift – the latter would have made it necessary to cancel the scan. There is room for improvement in the software here.
Tip: At the start and end of a scan, the scanner should point in the same direction if possible – this makes it easier to merge the individual sections later on. A complete start-to-end loop is sufficient. Small loops are not necessary when using RTK.
Total duration of the scans: over 4 hours.
TitleData processing & evaluation
The data collected totalled over 500GB. Processing took around 22 hours – so a powerful computer is essential.
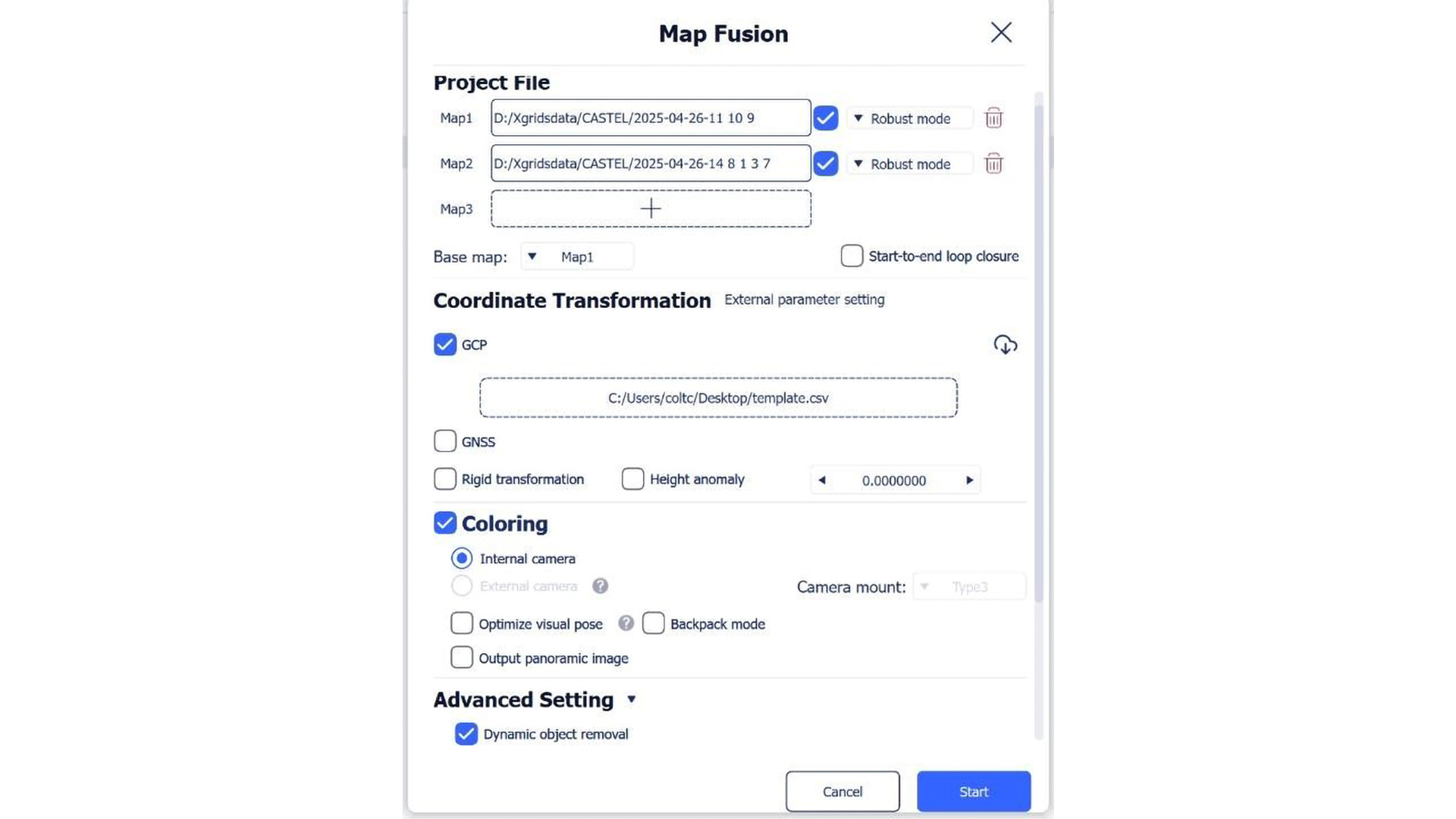
Despite the large amount of data, the processing was successful – without the ‘robust mode’. The resulting point cloud was well merged and showed no noticeable shifts.
The GCP template from the XGRIDS software should definitely be used for georeferencing – this is easily accessible via the download button.
TitleConclusion: SLAM is convincing - even better with RTK
The team is now convinced by the SLAM technology from XGRIDS. In its first attempt, the team didn't use RTK because it was worried that the signal wouldn't get through under the trees. During the second scan, however, it realised that a stable RTK fix is often possible even under thinner treetops.
Recommendation f the team: Use a survey-grade RTK system – this allows you to carry out long scans without drift.
Tip at the end: If SLAM drift occurs, stop the scan immediately. As long as the drift only lasts a short time, it can usually be corrected without much effort.
Original case study provided by XGRIDS