CHCNAV RS7 Scanner
TitleCHCNAV RS7 scanner - High-performance handheld LiDAR SLAM scanner
The CHCNAV RS7 is a modern handheld LiDAR SLAM scanner designed for the fast, accurate and cost-effective mapping of buildings and interiors. It combines high-performance sensor technology with a seamless device-to-cloud workflow and is aimed at users who value efficiency, reliability and high-quality 3D results.

TitleHigh-performance system
The RS7 was developed for practical use. Its robust, high-quality design makes it the ideal solution for construction projects, site surveys and technical documentation.
Its high scanning speed makes it possible to fully digitise even large indoor areas in a short time – without time-consuming preparation or complex setup.

TitleReliable results in demanding environments

Indoor environments place particular demands on mobile 3D scanners: long corridors, repetitive structures or multi-storey areas can quickly push conventional systems to their limits. The CHCNAV RS7 scanner has been designed specifically for such scenarios and delivers stable, complete point clouds – even under challenging geometric conditions.
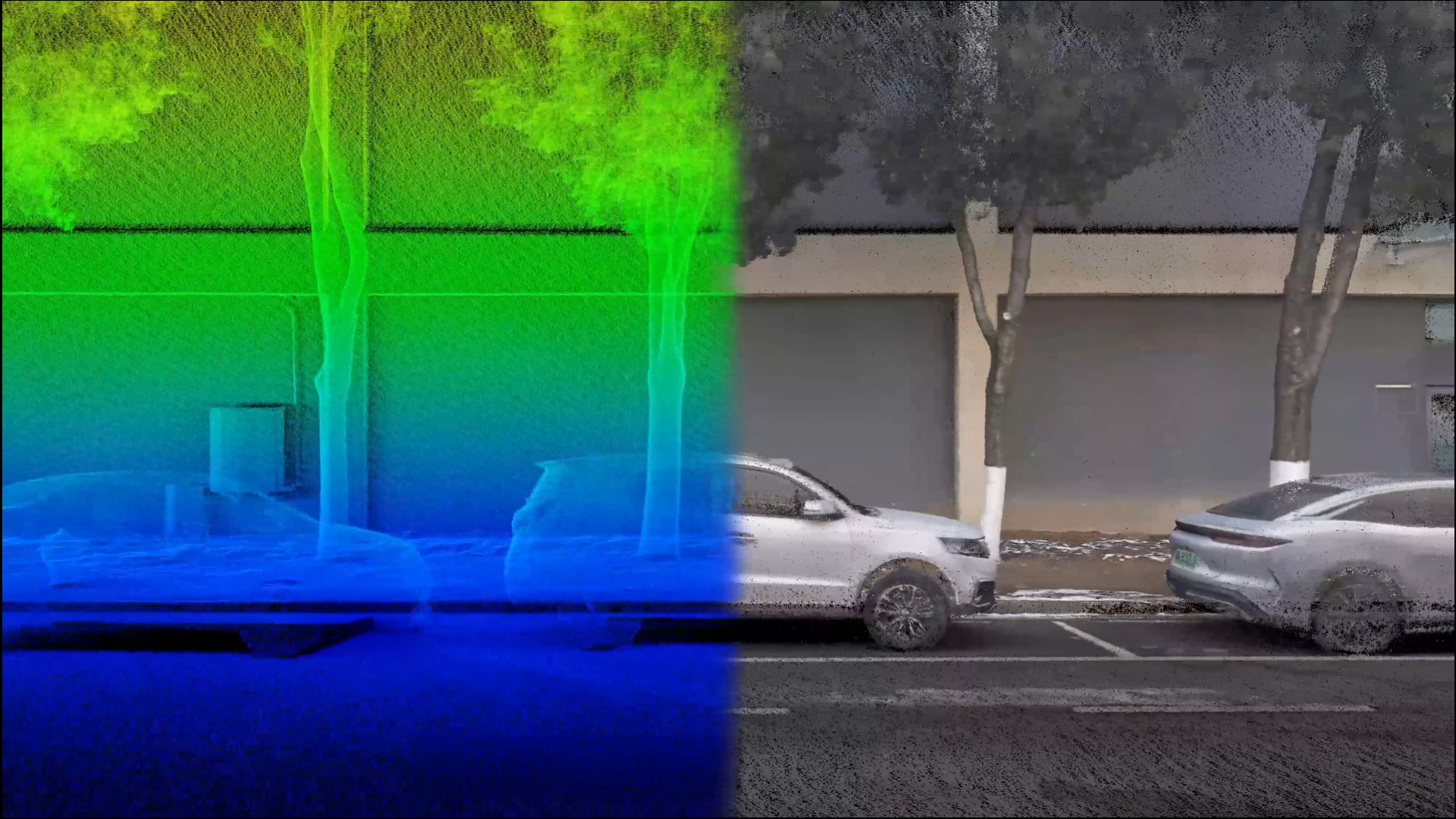
TitleHigh-quality 3D data with realistic rendering
In addition to precise geometric measurement, the system also enables detailed visual documentation. This results not only in accurate point clouds, but also in realistic 3D models in true colour. This greatly facilitates the analysis, presentation and further processing of the data.

TitleSeamless workflow from scan to ready-to-use model

The RS7 scanner is designed for efficiency: scanning, data transfer and processing work together seamlessly. Field surveys can be transferred directly to the cloud and processed automatically. This reduces manual intermediate steps and significantly speeds up project workflows.
TitleFuture-proof and easily integrated
Thanks to its open system architecture, the RS7 scanner from CHCNAV can be easily integrated into existing software and project environments. This makes the system suitable for both established workflows and growing requirements in the field of digital surveying and 3D documentation. The RS7 can also be conveniently combined with other hardware, thereby enabling more specialised and flexible workflows.


TitleVersatile 3D scanning for planning, documentation and analysis
The CHCNAV RS7 scanner has been developed for professional applications where precise, comprehensive and realistic 3D data is crucial. Thanks to its portable design, fast data capture and stable positioning, the system is suitable for both structured indoor environments and complex building structures.
Whether for site surveys, digital documentation or visual reconstruction – the RS7 enables the efficient capture of a wide variety of environments and creates a reliable data basis for planning, analysis and presentation. By combining geometric precision with true-to-life colour representation, projects across a wide range of industries can be realised cost-effectively and in a time-saving manner.
TitleFields of application
The scanner is used in particular in the following areas:
- Architectural surveying
- Interior design & renovation
- Construction
- Digital Twin
- Public safety & forensic investigations
- Culture & tourism
- Heritage


TitleHow the CHCNAV RS7 generates precise 3D data
The CHCNAV RS7 combines LiDAR technology, inertial measurement technology and intelligent SLAM algorithms to form a highly integrated mobile mapping system.
The continuous fusion of all sensor data generates a stable and consistent 3D point cloud whilst the system is in motion – without the need for external reference systems or complex markers.
TitleDeep INS + SLAM fusion for reliable mapping
The core of the system is the close integration of the Inertial Navigation System (INS) and SLAM algorithms. The integrated high-performance IMU, with a bias instability of less than 0.5°/h, detects even the slightest changes in movement and stabilises the trajectory in real time. This ensures that position determination remains reliable and with minimal drift, even in environments with few landmarks, such as long corridors or stairwells.

TitleHigh-density LiDAR scanning with an extended field of view

The latest-generation integrated LiDAR sensor operates at a capture rate of up to 1.15 million points per second. Combined with an ultra-wide field of view of 360° × 189°, it captures rooms in their entirety – including ceilings and peripheral areas. The high point density enables precise mapping of fine geometries and surface details.
TitleColour and image integration for realistic models
Two integrated 12MP HD cameras support geometric capture using high-resolution image data. Thanks to advanced binning technology, they provide clear results even in difficult lighting conditions.
The sensor data is processed synchronously to produce colour point clouds and visually realistic 3D models.
TitleAutomated processing & 3D reconstruction
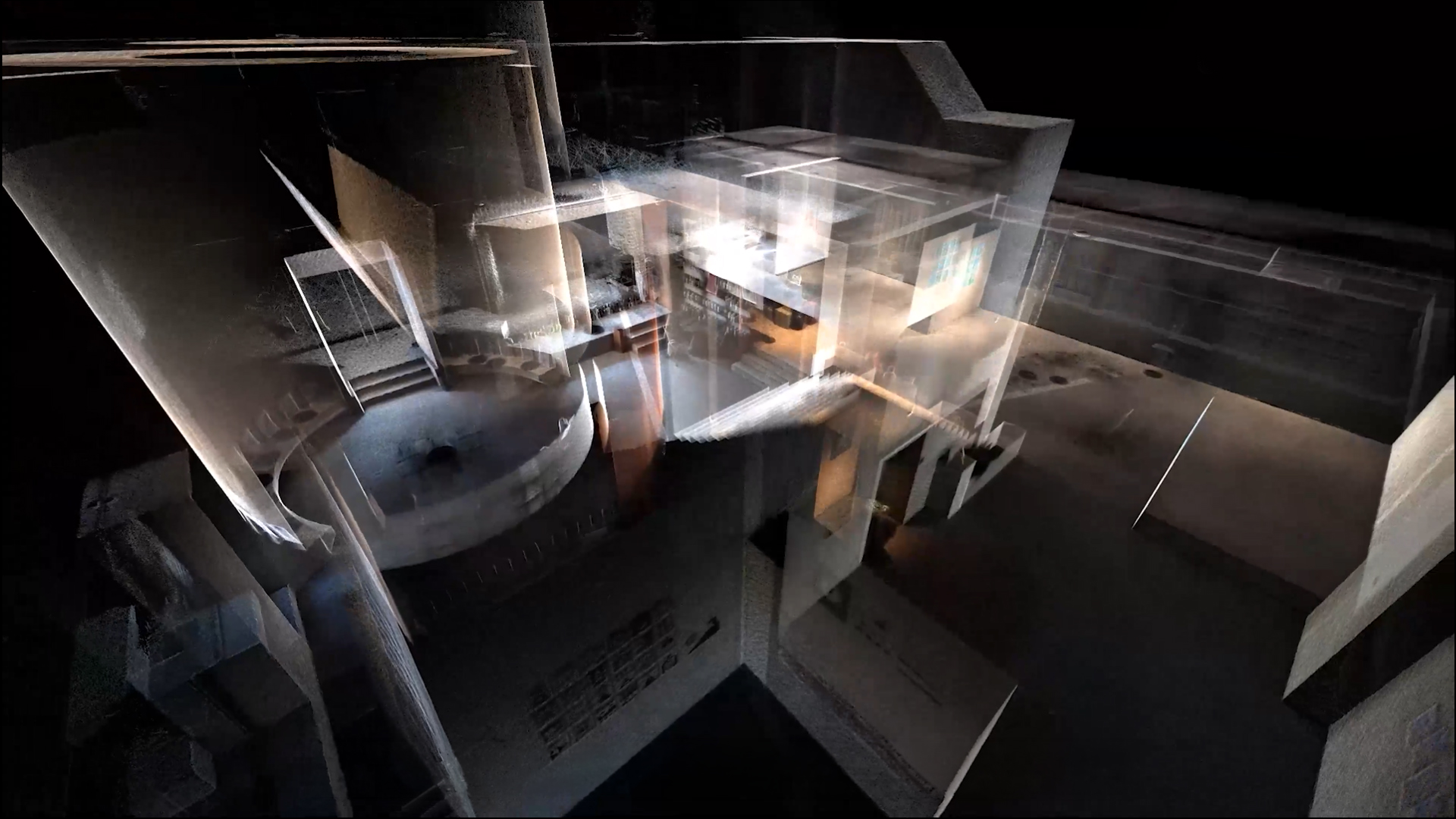
Once the data has been captured, it is processed via the integrated device-to-cloud workflow. The system engine uses the raw data to generate precise point clouds, mesh models and modern 3D Gaussian splatting visualisations.
The processing is largely automated, ensuring reproducible, high-quality results.

TitleCHCNAV RS7 - Technical details at a glance
The CHCNAV RS7 combines high-performance sensors, precise inertial technology and state-of-the-art data processing in a compact handheld system.
The following tables provide a clear summary of all technical specifications relating to LiDAR performance, the camera system, accuracy, data interfaces, system architecture and operating parameters.
TitleSpecifications
| General system performance | |
|---|---|
| Absolute accuracy | H: < 3cm RMS V: < 3cm RMS |
| Relative accuracy | 1cm |
| Repeatability | 2cm |
| Power supply mode | Battery integrated in handle |
| Battery capacity | 47.5Wh |
| Working time from a single battery | 150 min |
| Power consumption | 16W |
| Data storage | 512GB |
| Weight (with battery handle) | 1200g |
| Operating temperature | -20°C to +50°C |
| Ingress Protection | IP64 (according to IEC 60529) |
| Laser scanner | |
|---|---|
| Laser product classification | Class 1 (eye-safe) |
| Range | 40m @10% reflectivity |
| Channels | 64 |
| Max. effective measurement rate | Single return: 576 000 pts/sec Dual return: 1152 000 pts/sec |
| Field of view | 360° × 189° |
| Wavelength | 905nm |
| Camera | |
|---|---|
| Number of cameras | 2 x 12MP |
| Sensor size | 1/2 inch |
| FOV | 340°(H) × 360°(V) |
| Positioning and orientation system | |
|---|---|
| GNSS system | GPS: L1/L2/L5 GLONASS: L1, L2 BEIDOU B1,B2,B3 GALILEO E1/E5a/E5b |
| IMU update rate | 500Hz |
| Gyro zero bias instability | 0,5°/h |
| Gyro random walk | 0.01°/√h |
| Acc zero bias instability | 10 ug |
| Acc random walk | 0.017m/s/√h |
| Communication | |
|---|---|
| WLAN | 2.4GHz & 5GHz IEEE 802.11n/ac (U-NII-1/3) |
| Bluetooth | V5.3 (BR+EDR+BLE) |
| Ports | 1 x USB V3.0 Type-C port (data download) 1/4″ mounting thread |
| Software | |
|---|---|
| SmartGo software | Data acquisition control, real-time point cloud display, etc. |
| CoPre intelligent LiDAR processing software | POS processing, adjustment and refinement, point cloud generation, 3D modeling Supports colorized point clouds, 3D mesh models and 3D Gaussian Splatting (3DGS) outputs. |
| CoProcess | Point cloud processing with built-in CAD tools |
Better advice for users
If you are interested in our offer or would like to learn more about the CHCNAV RS7 scanner, then call us today and arrange a free and non-binding consultation appointment for you. We will answer all your questions. As a dealer and at the same time a user, we are well positioned to assist you even after the purchase.