Apache 4
TitleApache 4 – USV for precise hydrometric measurements
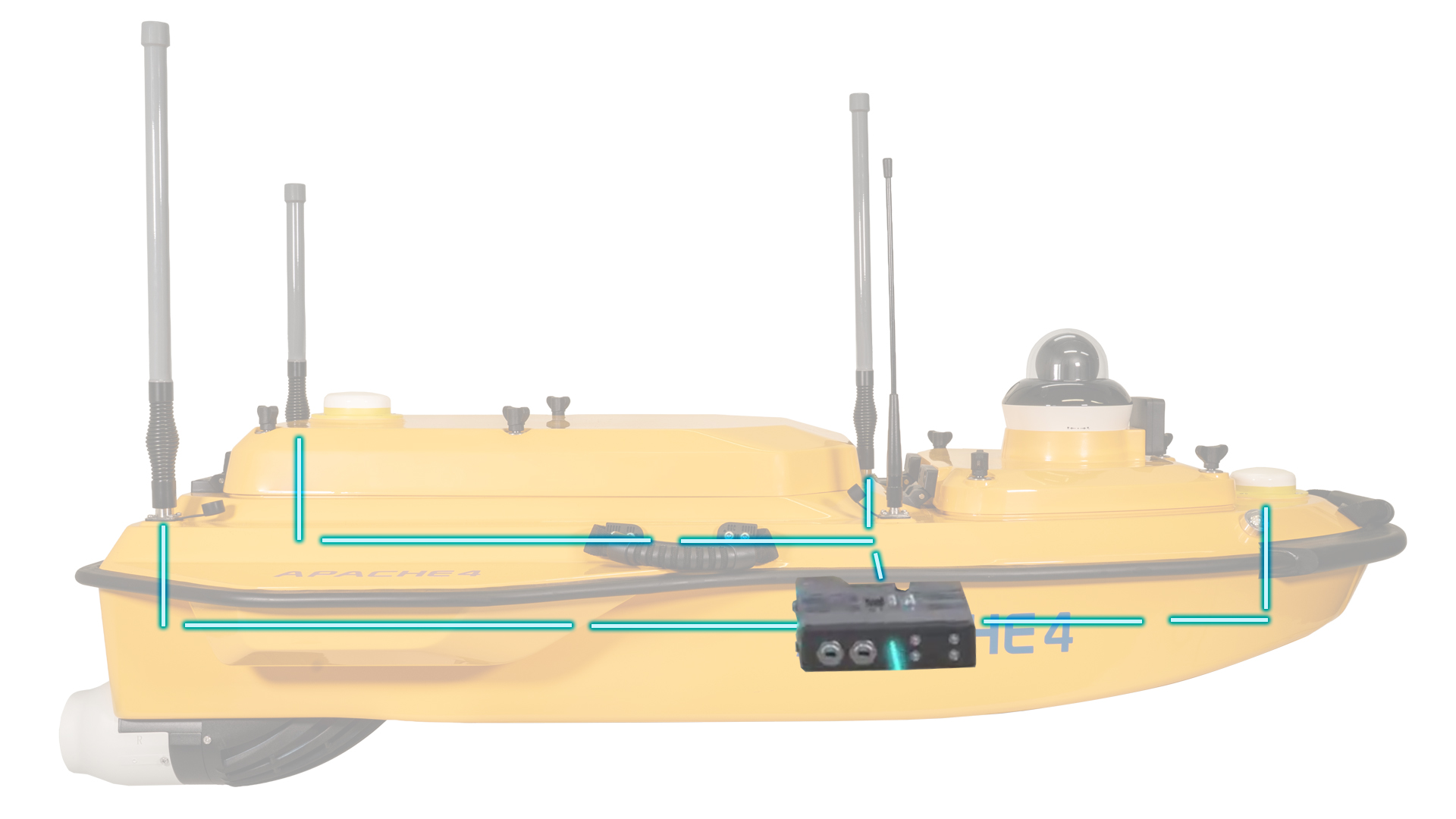
The Apache 4 is a specially developed unmanned surface vehicle (USV) for hydrographic measurement tasks in challenging flowing waters. Thanks to its combination of integrated sensor technology, precise navigation, and stable position control, the system enables reliable flow and discharge measurements even under difficult environmental and visibility conditions. The following section provides an overview of the key technical features that make the Apache 4 particularly suitable for hydrological surveys.
TitleApache 4 Pro
The Pro version builds on these features and offers an optimized design with reduced weight and increased durability. A one-piece fuselage structure provides up to 60% greater impact resistance, while the overall weight has been reduced by 30%.
The upcoming video provides a closer look at the Apache 4 Pro.
TitleAdaptive flow and suspension stabilization
The naval vessel has an autonomous control system that continuously adapts to changing flow conditions. This allows the Apache 4 to stay on course within specified profiles and maintain its position even in turbulent areas.
The integrated hovering and position stabilization improves the accuracy of flow estimation and ensures stable start and end points for ADCP measurements within a cross-section.


The Pro version offers further-improved straight-line navigation and achieves high positional stability (better than 0.5 m) even in strong currents of up to 4 m/s and at speeds of up to 6 m/s.
TitlePrecise positioning via GNSS and IMU
Apache 4 combines GNSS data with inertial measurements (IMU) for position and attitude determination. This fusion ensures that reliable position information is available even in the event of a brief loss of satellite signal.
The system compensates for hull movements and reduces measurement deviations during GNSS interference, for example under bridges. In addition, an obstacle radar and live video data transmission contribute to safe control in conditions of limited visibility.
In addition, the Apache 4 Pro features a new generation of anti-collision and drive protection mechanisms. An optional “high-density” wood protection net technology is available, which reduces the risk of the motor becoming entangled by up to 70%.
TitleBuilt-in single beam echo sounder
The integrated single-beam echo sounder expands the hydrographic capabilities of the USV. It is used both to verify and supplement the ADCP bottom tracking data and to capture water depth profiles. This allows flow velocity and sounding data to be precisely combined, which greatlysuppoirts the analysis of cross-sectional profiles.
The Apache 4 Pro utilizes a new generation of highly sensitive, interference-resistant transducers with integrated vibration damping. This enables a reduced blind zone of just 10 cm, a resolution of up to 3 mm, and a signal-to-noise ratio improved by 6 dB.
TitleCompatibility with common ADCP systems

Apache 4 can be equipped with a wide range of popular ADCP sensors, including M9, RTDP 1200, RiverPro, and RiverRay. The boat provides the necessary power supply, data interfaces, network connection, and 4G transmission.
The protected sensor mounting and reliable data integration create a robust platform for a wide variety of hydrological measurement tasks.
The Pro version enhances this flexibility with a central instrument mount that allows for the integration of additional sensors, such as multibeam echo sounders or other hydrological measurement systems. It is also specifically optimized for integration with the HQ-400 multibeam echo sounder.

TitleTypical applications for Apache 4
Apache 4 is used in a wide range of hydrological and hydraulic engineering tasks that require precise flow, depth, and runoff data. Thanks to its combination of autonomous navigation, integrated sensor technology, and stable driving dynamics, the system is suitable for both routine investigations and complex analyses in dynamic water areas.
The following fields of application show typical uses for the vehicle.
Flood risk assessment
Reliable information about flow behavior, cross-sectional geometry, and discharge capacities is necessary for the risk analysis of flood events. Apache 4 enables the collection of this data even at elevated water levels or with limited access. The measurement series obtained support hydrological models, hazard maps, and planning decisions in flood protection.
Sediment transport & morphology studies
Simultaneous measurements of flow and bed geometry play a key role in understanding bedload and suspended sediment processes. The USV can capture continuous cross-sectional profiles, document changes in the river bed, and record flow fields. This information is important for erosion studies, shipping routes, structure monitoring, and the management of sediment-laden waterways.
Monitoring measurements at dams & reservoirs
Apache 4 is ideal for monitoring measurements at dams and reservoirs where high accuracy and repeatability are crucial. The combination of ADCP technology, GNSS positioning, and echo sounder allows precise detection of changes in flow conditions, sediment deposits, and changes in depth and profile in the reservoir and in the vicinity of structures. The data obtained is used for structural and hydraulic condition monitoring, early detection of potential risks, and long-term assessment of the operational safety of dams and reservoirs.
Flow analyses in port & coastal areas
Apache 4 is also used in ports, estuaries, and artificially influenced waterways to determine flow direction, velocity, and local turbulence. Such data is used to analyze flow conditions at quay facilities, plan infrastructure measures, and analyze flushing and maintenance strategies in port operations.
Measurement of river discharges
The combined use of ADCP and echo sounder enables the direct determination of flow cross-sections in natural and regulated waters. Apache 4 captures both the flow distribution and the associated depth profile. These measurements are used for water balance recording, water level management, water monitoring, and long-term hydrological studies, among other things.
Support for emergency and rescue operations
The Apache 4 Pro can also be used to support emergency and rescue operations. Thanks to its unmanned platform, it enables safe reconnaissance in hazardous waters without putting rescue personnel at risk. Combined with real-time video transmission, precise navigation, and optional sensors, the system assists with search and rescue operations, analysis, and mission planning in critical situations.

TitleHow Apache 4 works
The naval vessel is designed to autonomously traverse pre-planned profiles and cross-sections while continuously capturing hydrological measurement data.
Adaptive course and flow control keeps the USV stable and on track even when flow velocities change. This results in clean track lines and precise cross-section data without the need for manual corrections.
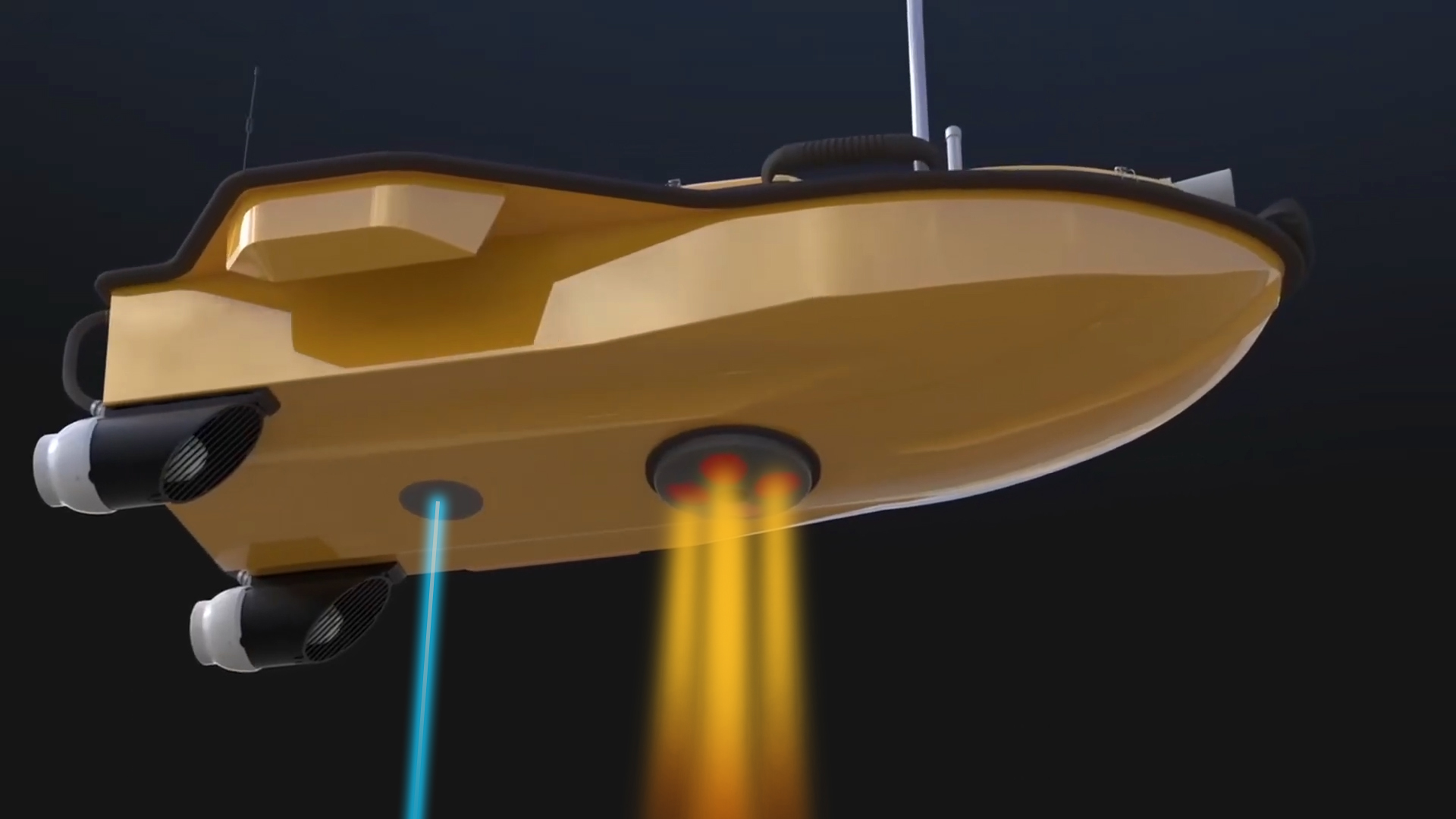
TitleCoupled depth & current measurement
Apache 4 can simultaneously capture ADCP data for flow measurement and echo sounder data for bottom topography. Simultaneous capturing enables direct correlation between flow profile and depth structure. This results in complete hydrometric cross-section data sets, which are required for discharge calculations or change analyses.
TitleHydrological project workflow
1. System configuration & sensor installation
The necessary sensors – typically ADCP and single-beam echo sounder – are installed on site in the designated mounting area of the vehicle. Electrical and data connections are made via standardized interfaces.
The measurement parameters are then set up in the respective software environment.


2. Resource planning
One or more routes are defined for the section of water to be surveyed, for example cross-section lines or profile-based measurement paths. These routes are transferred to the mission planning software, which the USV then navigates autonomously. Shore distances, travel speeds, and measurement intervals can be specified.
3. Autonomous measurement mode
After launch, the vehicle follows the planned route and transmits the sensor data it collects – for example, via radio or mobile phone connection – to the ground station.
The adaptive control system stabilizes the vehicle's profile, compensates for current influences, and maintains its position at the start and end points of the measurement.
Meanwhile, depth and current data are captured simultaneously.


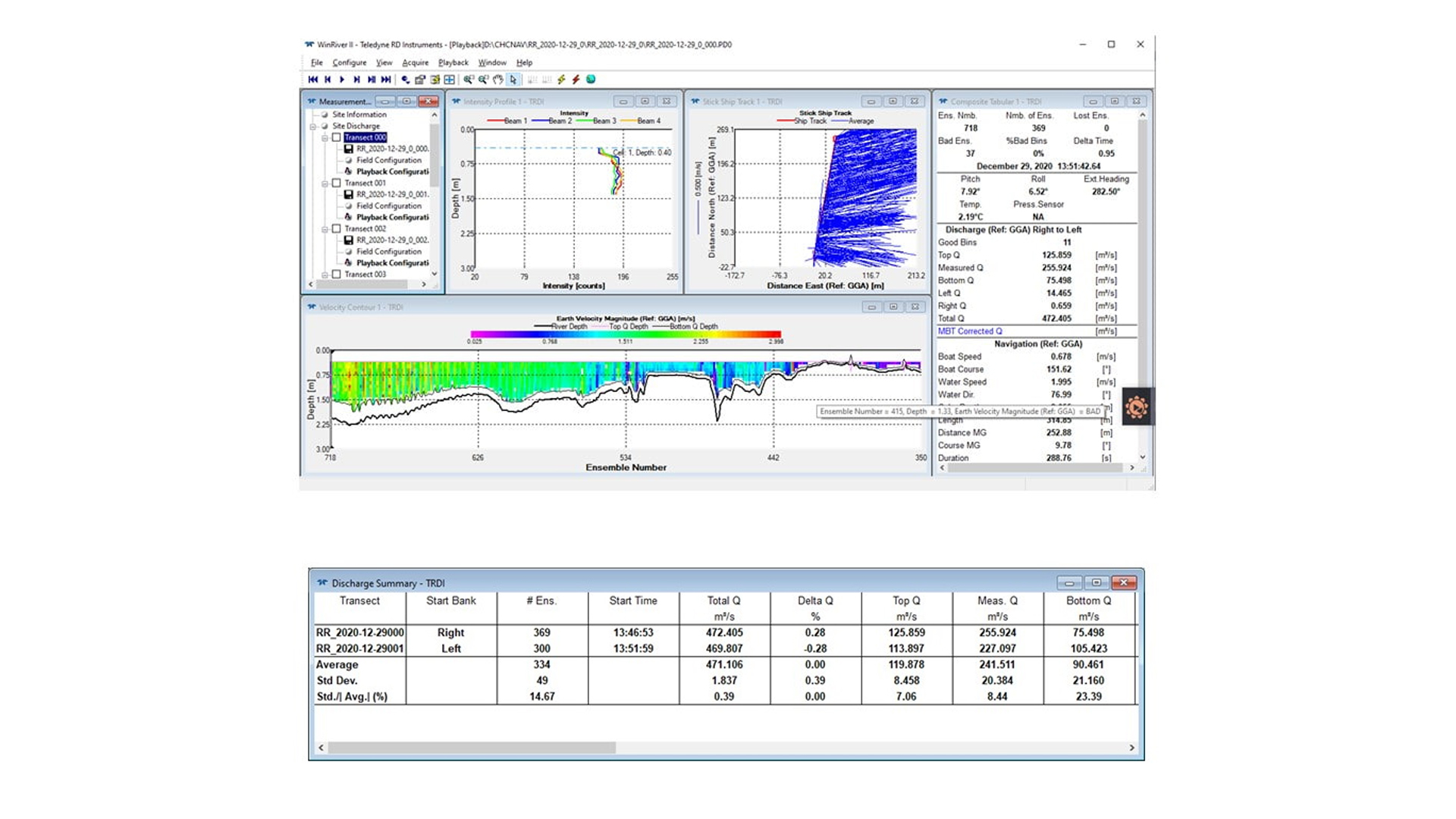
4. Data collection & analysis
The captured data is compiled in the analysis software to form complete cross-sectional and flow profiles.
Autonomous operation allows measurement runs to be carried out efficiently, which reduces personnel requirements and increases the repeatability of results.
The data sets obtained form the basis for discharge calculations, trend analyses, and hydrological modeling.

TitleSpecifications of the Apache 4
Discover the key technical features of the Apache 4: This powerful USV system offers precise sensor technology, robust navigation, and reliable measurement performance for demanding hydrological applications.
The following specifications provide a clear overview of the vehicle's design, equipment, and technical performance data.
TitleSpecifications of the Apache 4
Product characteristics
| Features | |
|---|---|
| Size (W x D x H) | 1200mm x 750mm x 400mm |
| Material | High-strength carbon fiber* |
| Weight | 13kg |
| Maximum load capacity | 40kg** |
| Wave and wind protection | 3rd wind stage and 2nd wave stage |
| Hull construction | Triple-hulled ship |
| GNSS | Intern GNSS antenna |
| Waterproof | IP67 |
| Draught | 8.6cm (unloaded) |
| Indicator light | Two-color (positioning and differential signal) |
| Camera | 360° panoramic video |
| Direction control | Turning without a control motor |
*The Apache 4 Pro features a housing reinforced with Kevlar composite.
**The Apache 4 Pro has a maximum load capacity of 50kg.
Technical characteristics
| Features | |
|---|---|
| ADCP compatibility | Compatible with RiverStar, M9, RiverPro, RiverRay, RioGrande, and other ADCPs |
| Available instruments | ADCP, integrated compact multibeam echo sounder, side-scan sonar, water quality monitor, sampling container |
| Distance and range for obstacle avoidance | 0.2 – 40m (H: 112°, V: 14°) |
| Propeller type | Brushless DC motor |
| Engine power | 800 W |
| Max. engine speed | 7200 ± 5% RPM |
| Li-ion battery capacity | 32.4V; 23.1Ah |
| Battery life | 9.8 hours at 1.5 m/s (1 battery set, expandable) |
| Power supply | Support for single/dual symmetrical batteries |
| Battery charging time | 3h |
| Maximum speed of the boat | 6.5m/s |
Communication
| Features | |
|---|---|
| Data communication | Standard 4G and remote control |
| Remote control range | 1km (Remote); Unlimited (4G) |
| SIM card slot | Nano SIM |
| Reserved interface | 2x RJ45 ports, 2x serial RS232 ports |
| Navigation mode | Manual or autopilot |
| Data storage | Local (multi-channel) & remote control |
| Software | Easysail |
D270 Single beam Echo Sounder
| Features | |
|---|---|
| Data type | CHCGD, NMEA SDDPT/SDDBT, Originalwellenform |
| Tone range | 0,1m bis 200m |
| Sound accuracy | ±0,01m + 0,1 % x D (D ist die Wassertiefe) |
| Resolution | 0,01m |
| Maximum sampling rate | 30 Hz |
| Frequence | 200 kHz |
| Beam angle | 6,2° ± 1° |
| Adjustment range for sound velocity | 1400 – 1700m/s |
| Built-in water temperature sensor | -55 °C bis +100 °C, Real-time correction of the speed of sound |
Positioning
| Features | |
|---|---|
| Satellite system | BDS B1I/B2I /B3I; GPS L1C/A/L2P(Y)/L2C/L5; Galileo E1/E5a/E5b; GLONASS L1/L2; QZSS L1/L2/L5 |
| Single Point Position (RMS) | Horizontal: 1,5m; Vertikal: 2,5m |
| DGNSS positioning accuracy | Horizontal: 0,4m + 1 ppm; Vertical: 0,8m + 1ppm |
| RTK positioning accuracy | Horizontal: ±8mm + 1 ppm; Vertikal: ±15mm + 1 ppm |
| Radio logs | Satel 3AS, CHC, TT450, Transparent |
| Course accuracy | 0,1 ⁰ @1 m baseline |
| Inertial navigation stability | 6 ⁰/ h (Accuracy drop 1 m after 20 s) |
| IMU update rate | 200 Hz |
Better advice as a user
If you are interested in our offer or would like to learn more about the Apache 4 USV, then call us today and arrange a free and non-binding consultation appointment for you. We will answer all your questions. As a dealer and at the same time a user, we are well positioned to assist you even after the purchase.